CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

基于无人机技术的口岸核与辐射突发事件应急侦测系统研制
作者:陆地 周俊涛 孙晓飞 尚迪 毕可华 杜瑶芳
陆地 周俊涛 孙晓飞 尚迪 毕可华 杜瑶芳
核能的和平利用与核技术应用在20世纪以来人类社会生产生活飞跃式发展中起着举足轻重的作用,使全球公众受益。但随之而来的副作用不容忽视,核安全、核安保问题始终是悬在人们头上的达摩克利斯之剑,日本福岛核事故以及发生在格鲁吉亚、保加利亚等国的核扩散案例,时刻发出警示。尽管当前国际社会已就防范核安全、核安保事件达成共识,但产生核污染、核扩散、核恐怖主义活动的风险因素并没有消除,特定地区或特定时期甚至可能加强。例如,一些前苏联加盟共和国对苏联时期遗留的核材料和放射性物质监管能力不足,导致流入黑市,成为全球核安全重大隐患。据国际原子能机构(IAEA)非法贩运数据库(ITDB)统计,1995—2021年,各参与国共报告放射性物质与特殊核材料相关事件3928起。
目前,我国面临的国际安全局势复杂多变,国家安全的内涵和外延不断扩大,核恐怖主义威胁时刻存在。中国海关作为把守国门的第一道防线,面对经济全球化带来的反恐、维稳、防扩散、防渗透等方面的形势十分严峻复杂,任务十分繁重艰巨,因此有必要研究开发更加适用于口岸一线应用场景、更加高效易用的核与辐射探测系统。基于此目的,作者团队着手研制基于无人机技术的口岸核与辐射突发事件应急侦测系统。近年来,有很多单位在无人机辐射探测领域开展研究,如北京中智核安科技有限公司研制的PeterPan系列具有谱仪功能的无人机辐射探测设备[1]。以无人机作为平台的核与辐射突发事件应急侦测系统首先是无人化的装备[2],这样可以避免人员和辐射物质的直接接触;其次,无人机在空中飞行不受地面遮挡限制,可以快速高效到达指定的辐射探测地点,从而节省不必要的环节,而且无人机技术当前已经很成熟,有成本优势,非常适用当前辐射探测领域。
1 辐射探测模块设计
对现有各类可选辐射探测器的优缺点进行比较,见表1。
表1 各种辐射探测器的优缺点
Table 1 Advantages and disadvantages of various radiation detectors
探测器名称 | 优点 | 缺点 | |
器 | 电离室 | 3. 稳定性好 | 灵敏度相对较低 |
G-M计数管[3] | 4. 成本低廉,便于使用 | 2. 响应慢 | |
闪烁体探测器[4] | 3. 灵敏度高 | 能量分辨率较低 | |
半导体探测器[5] | 4. 抗干扰能力强 | 易受到温度影响 | |
通过对以上几种探测器优缺点的比较,结合基于无人机技术的核与辐射突发事件应急侦测系统研发的实际需求,本研究选择电离室探测器作为辐射探测器,并通过提高工作气体压强的方式弥补普通电离室探测器灵敏度较低的缺点。本系统电离室辐射探测器的基本性能如表2所示。
表2 辐射探测器的基本性能
Table 2 Basic performance of radiation detectors
指标 | 参数 |
密封球材质 | 不锈钢 |
工作气体 | 高纯氩气 |
灵敏体积 | 4 L |
工作气体压强 | 25 Atm |
能量响应范围 | 50 keV~3 MeV |
空气吸收剂量率测量范围 | 0.01 μGy/h~100 mGy/h |
相对固有误差 | ±15% |
高气压电离室探测器经中国辐射防护研究院对不同量程进行测试,结果见表3。
表3 辐射探测器测量结果的准确性
Table 3 Accuracy of measurement results of radiation detectors
137Cs辐射场剂量率(μGy/h) | 校准因子 | 相对固有误差 (%) |
1.45×10-1 | 1.04 | -3.4 |
5.93×10-1 | 1.06 | -5.6 |
6.39×100 | 1.01 | -1.1 |
6.35×101 | 0.95 | 5.4 |
4.78×102 | 1.01 | 0.2 |
5.81×103 | 1.01 | -0.5 |
2.32×104 | 1.00 | 0.0 |
1.00×105 | 0.89 | 11.8 |
2 数据传输模块设计
2.1 数据传输方式
当前市面上数据传输方式有很多,蓝牙、Wi-Fi、Zigbee、433 M、915 M、2.4 G的Lora,以及可以联网的GPRS(General Packet Radio Service)技术[6]。
由于本系统对实时性要求比较高,但是对带宽要求不是特别高,同时为了无线通信所在的无线信道干扰较少,采用加拿大XBEE公司的915 MHz的Lora技术。通信接口采用232通用串行接口,因为数据需要通过智能工控电脑传输给无线数据传输系统,由于电平不一致,需要将智能工控机的UART的TTL电平转化为CMOS电平后,才能连接数据传输系统。
2.2 数据传输协议
本数据输出协议使用的是UART通用串行协议,通用串行协议硬件上是三线制,硬件上也称为交叉信号线,分别是智能工控机的发送端口TX接数据传输接口的RX端口,智能工控机的接收端RX接数据传输端口的TX端口,地线互连从而使地线低电平参考电压一致。
3 系统终端硬件
3.1 系统终端硬件结构
基于无人机的核与辐射突发事件应急侦测系统终端硬件终端主要分为控制模块、数据采集模块、数据传输模块、电源模块,硬件框架见图1。
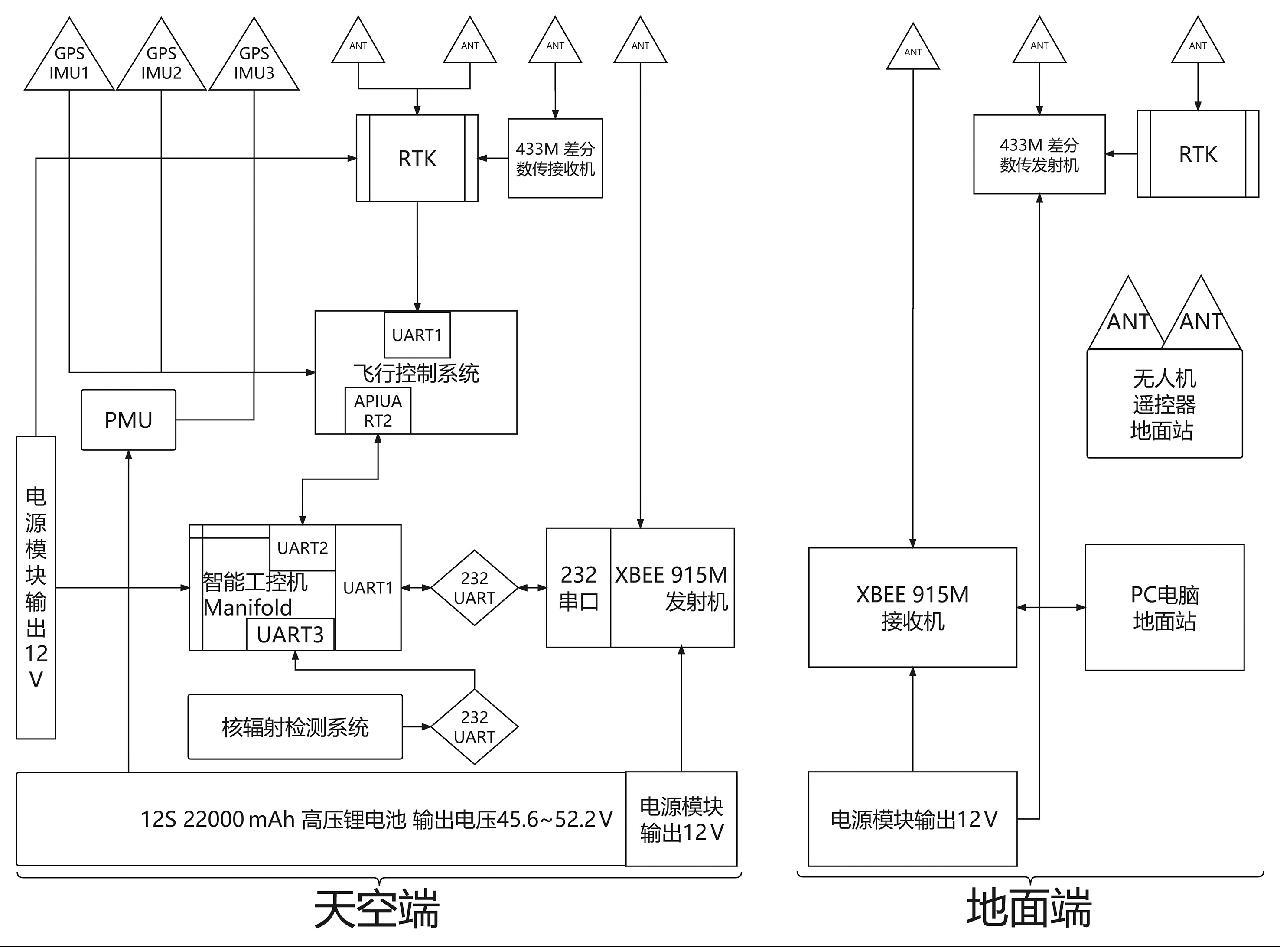
图1 基于无人机的核与辐射突发事件应急侦测系统硬件框架图
Fig.1 Hardware frame of nuclear and radiation emergency detection system based on drones
3.2 系统电源
本系统电源是使用无人机的两块6 S 22000 mAh高压锂电池串联为22000 12 S高压锂电池,电压范围为45.6~52.2 V,其中无人机动力系统直接相连12 S高压锂电池,电源管理模块将锂电池电压从45.6~52.2 V降压至12 V,同时给智能工控机Manifold Tegra K1[8],辐射探测模块也是图1中脉冲信号采集、温度采集、位置采集电路模块的总称。其中,控制模块是图1中ARM主控制电路和调试接口电路,以下简称“A3飞行控制系统”,且可以监测无人机电池电压,故可直接接12 S高压锂电池,数据传输模块使用电源管理模块12 V电压,具体模块电压和功耗见表4。
3.3 高压模块
高压模块的电路设计要求:(1)要考虑电压稳定性,如果电压不稳定会影响耗电设备的稳定,如将45.6~52.2 V宽电压输入,输出12 V,如果电压不稳定,后续设备将不会正常工作。而考虑电压输出的稳定有一个非常重要的指标是纹波(电源输出的最高电压和最低电压差值),对于智能工控机Manifold Tegra K1、辐射探测模块、数据传输模块,要求纹波低于40 mV。(2)同时为防止电源短路、发生火花、引起火灾,电源需要接地保护。(3)考虑到3台设备同时使用一个电源,总额定功率是9 W,为了防止设备在过载情况下功率增大,按照60%降额要求,保证电源最大输出功率大于15 W。
表4 主要芯片和模块的电压和功耗
Table 4 Voltage and power consumption of major chips and modules
主要芯片和模块 | 电压范围 (V) | 功耗 (W) |
Manifold Tegra K1 | 12 | 5 |
辐射探测模块 | 12 | 3 |
A3 | 45.6~52.2 | 5 |
数据传输模块 | 12 | 1 |
3.4 数据传输模块
本系统数据传输模块选择XBEE 915M模块,其输入电压是范围是9~42.6 V,功率最大1 W,其工作温度为-40~85℃,本模块常规工作温度比系统的辐射检测仪的范围宽,不会影响整个系统的常规工作温度的范围。此外,相比其他数据传输模块,该模块在抗静电干扰性、低功耗方面有一定的优势。本设计中,XBEE 915M模块是串口通信方式,主控芯片通过发送AT指令,来控制数传开启,让XBEE 915M和地面端电脑地面站建立连接,将数据上传给PC地面站(表5)。一般空中速率设置越高传输距离就会越短,所以根据辐射检测场景需求,选取速率为2.4 kbps作为空中传输速率。
表5 XBEE 915M模块传输速率
Table 5 XBEE 915M module transmission rate
型号 | (kbps) | 等级数 | (kbps) |
XBEE 915M | 2.4 | 6 | 0.3, 1.2, 2.4, 4.8, 9.6, 19.2 |
3.5 控制系统
本系统采用大疆A3 PRO飞行控制系统,是当前市面上最稳定、抗干扰性最强的控制系统,因为控制系统对整个系统起到至关重要的作用,飞行控制系统的选择不仅仅从数据的运算、处理和存储出发,还需要考虑其功耗、体积以及与其他模块通讯方式,故主控是整个系统运行的核心前提。飞控系统主要实现以下功能:(1)IMU(惯性测量单元)中的加速度计、陀螺仪、磁罗盘、气压计采集无人机各种状态参数,进行空间坐标融合得到无人机空间坐标姿态,同时获得GPS空间坐标,从而反馈给飞行控制系统,再控制动力系统做好无人机空间精准定位;(2)通过飞控的电源模块,检测电池电压,从而判断无人机当前电池电量,以及后续飞行剩余时间;(3)获得高精度RTK坐标信息,使无人机空间定位达到厘米级别。
3.6 智能工控系统
本系统选用Manifold开发平台,基于ARM Cortex-A15内核的32位微处理器,满足本系统对低功耗的要求,以及系统的可移植性,为系统功能扩展提供了丰富的外部接口。本系统功能有以下几方面:利用Modbus协议[9]固定周期读取对高气压电离室传感器测量的辐射水平监测数据;通过串口实现与XBEE 915M模块的通信;通过UART实现与飞行控制系统的通信,获得飞行高度、经纬度信息、时间、温度以及飞行状态参数,如电池电量、航向等。
3.7 RTK定位系统
本系统需要实时了解系统所处的地理位置,对定位精度要求较高,因此在硬件设计时选取了RTK定位[10],利用此定位系统可准确定位放射源的位置,同时快速分析特定地理坐标的辐射量等。根据需要,本系统选用了UBLOX公司的NEO-9M模块,尺寸16 mm×12.2 mm×2.4 mm,同时搭配双螺旋天线,安装天线要求空间距离大于50 cm,且还需要搭配地面定位模块,通过数传互联地面端和天空端定位模块,NEO-9M可实时进行位置差分,使定位精度达到厘米级别,定位时间小于1 s。该模块可在-40~85℃环境下工作,其默认波特率9600,通过串口与飞控连接。
4 系统软件设计
4.1 系统软件总体设计
系统软件设计是根据机载辐射监测终端的硬件结构进行飞行数据以及监测数据的收集和发送,在Windows 1064位操作系统中使用地面站软件进行数据的接收、分析处理以及图形化绘制(图2)。软件采用C语言的结构化与C++面向对象的混合软件设计思想,整个软件系统包含以下4个部分:(1)飞行数据采集服务程序,通过大疆妙算工控机采集机载监测终端当前的位置信息,包含经纬度、高度等信息;(2)辐射监测数据采集服务程序,通过大疆妙算工控机与辐射监测硬件建立串口连接通过ModBus协议采集辐射计数率与剂量率等信息;(3)通讯服务程序,通过无线数据传输设备建立天空端与地面端的数据传输通道,实现天空端工控机软件与地面站PC电脑软件之间的数据信息交互;(4)地面站服务程序实现数据实时获取、接收,利用高德地图SDK结合Qt图形化软件进行飞行监测数据的2D/3D/图表形式的显示和反馈处理。本系统的主控器采用ARM Cortex-A15架构的大疆Manifold处理器,调试是UART串口,支持程序的下载和调试以及跟踪。上位机的开发选取的Qt工具,内置丰富的描画函数,方便用户界面系统的开发。
图2 系统构成
Fig.2 System composition
4.2 飞行数据采集服务程序设计
飞行数据采集模块利用串口驱动建立大疆A3飞行控制器和Manifold处理器之间的物理连接(图3)。周期性采集飞行控制器的位置信息与高度信息。
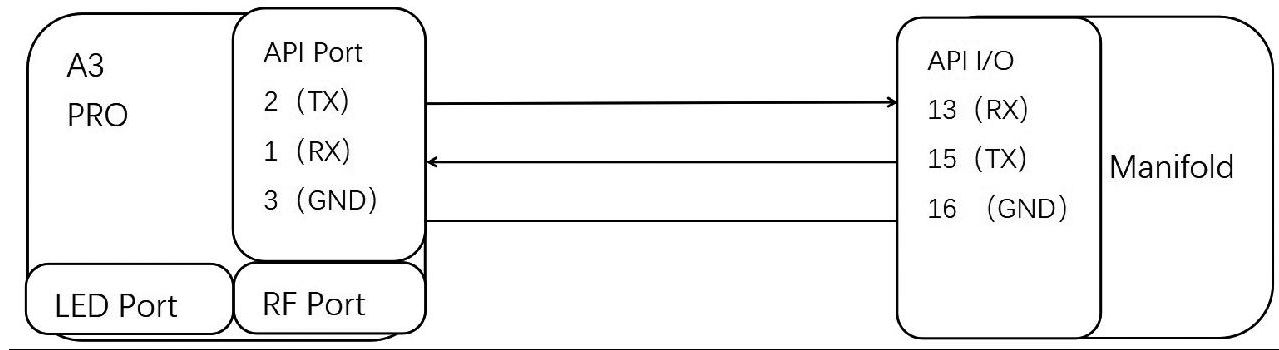
图3 大疆A3飞控与Manifold串口连接示意图
Fig.3 Schematic diagram of serial port connection between DJI A3 flight control and Manifold
4.3 辐射监测数据采集服务程序设计
整个辐射监测数据采集程序利用串口驱动建立辐射监测传感器与大疆Manifold之间的物理通信(图4),以Modbus协议以1 s为周期读取辐射监测传感器的数据。数据格式使用RTU数据模式,按照float(CD AB)格式取出剂量率和计数率数据。

图4 高压电离室辐射传感器与Manifold的串口连接
Fig.4 Serial connection between radiation sensor of high pressure ionization chamber and Manifold
4.4 通讯服务程序设计
下位机通过工控机Manifold对飞行数据与辐射监测数据进行打包封装,并将其转换成可用于与上位机地面站软件进行通讯的Mavlink协议[12],通过无线数据传输设备进行上位机与下位机的数据传输(图5)。
4.5 上位机客户端程序设计
4.5.1 描绘显示功能设计
按照本系统的功能需求,上位机地面站软件需将接收到的辐射监测数据以及位置信息数据结合,向用户提供2D描绘[13]、3D描绘[14]、数值、折线图形式的显示(图6),用户可以根据需求自由切换显示形式。同时,需具备剂量率或计数率超阈值报警功能,当接收到的辐射数据超过阈值时,上位机界面根据报警级别显示报警弹窗并发出报警声音,使监测人员及时得到提示(图7)。
4.5.2 数据存储功能设计
按照本系统设计功能要求,数据采集频率高、周期短,数据量较大,为方便操作人员飞行监测任务结束后对监测数据进行进一步分析,上位机地面站对飞行位置信息和辐射监测数据进行了日志存储[15]。日志采用CSV格式存储,操作人员可以利用Excel的数据分析和绘图工具对监测数据进行分析(图8)。
4.5.3 轨迹还原功能设计
考虑到辐射监测飞行的条件苛刻,地面站系统软件可以对已经存储的日志进行回放,还原飞行轨迹与数据采集场景,日志回放过程中支持暂停播放功能,方便操作人员对具体位置点的辐射监测数据进行定点分析。
图8 监测数据的日志CSV存储与图表分析
Fig.8 Log CSV storage and chart analysis of monitoring data
5 结论
本系统的研制是以海关发现、拦截、打击放射性物质和特殊核材料跨国非法转运的应用场景和职责目标为出发点,主要创新点体现在以下几方面:以无人机平台为载体,以高气压电离室为辐射传感器,在核与辐射突发事件中进行远程非接触式辐射监测,减少了工作人员抵达危险区域的必要性,降低受到照射的概率;可以对口岸现场任意目标、任意点位的辐射水平实施监测,不受现场条件的限制;可以按照预定的程序自动飞行、悬停,连续监测、记录飞行轨迹的辐射水平,并以直观的形式进行描绘和显示。
虽然本系统存在诸多不足,例如硬件系统有待优化、智能化水平仍较低等,距离商用还有一定差距,还需进一步研究和改善,但将无人机技术应用于海关口岸通关货物、集装箱、交通工具常规辐射探测和核与辐射突发事件应急监测方面仍是一种有益探索,也为其他领域,如环境监测、公共安全、国防、安全生产等提供了一定的借鉴价值,在一定程度上拓宽了无人机的应用边界,扩充了辐射监测的形式和手段。
参考文献
[1]谭海, 廖戈剑, 王仁波, 等. 核辐射智能检测车控制系统设计[J]. 核电子学与探测技术, 2021, 41(2): 315-320.
[2] Bouabdallah S, Becker M, Siegwart R. Autonomous miniature flying robots:coming soon[J]. IEEE Robotics & Automation Magazine, 2007(14): 88-98.
[3]伦振明, 耿利新,龙林,等. 放射性物品存储容器检测装置: 202120531040[P]. 2021.
[4]李北城, 赵孝文, 高雅娟, 等. 一种塑料闪烁体探测器装置: 205246890U[P]. 2016.
[5]韩东. 一种便携式半导体探测器: 202122118778[P]. 2021.
[6]虢清伟,陈思莉,陈富章, 等. 一种核辐射源设备监控方法及其装置: 201910293794.8[P]. 2020.
[7]王俊粉.开关电源设计引发的“六性”问题[J]. 电子元器件与信息技术, 2022, 6(2): 86-88.
[8] Xiaoyi YIN, Zhen CUI, Hong CHANG, et al. Extending generalized unsupervised manifold alignment[J]. Science China (Information Sciences), 2022, 65(7): 172103:1-172103:18.
[9]赵成龙. 一种基于MODBUS协议检测从设备重启的方法: 202210180282[P]. 2022.
[10]李彤. 工程测绘中RTK测量技术特点与具体应用研究[J]. 居舍, 2022(18): 62-65.
[11]叶佳. 基于SDK开发的民航无线电监测定位系统研究[D]. 四川: 中国民用航空飞行学院, 2021.
[12]张凌浩, 王胜, 周辉, 等. 基于MAVLink协议的无人机系统安全通信方案[J]. 计算机应用, 2020, 40(8): 2286-2292.
[13]牛成成,傅建中,林志伟, 等. 一种地图轻量化压缩传输方法: 202011193070.5[P]. 2020.
[14] 邓小飞, 谢元华, 张豆豆, 等. 一种结合地图数据的3D展示处理方法及装置: 202210053930[P]. 2022.
[15] 李亮, 范渊, 刘博. 一种日志处理方法、装置及存储介质: 111158876A[P]. 2020.
