CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

基于激光雷达和无人机的生物气溶胶 监测技术研究
作者:魏雨 王国强 王旭东 蔡京 王朕 尚港阳 代飞
魏雨 王国强 王旭东 蔡京 王朕 尚港阳 代飞
Abstract In order to quickly respond to the needs of monitoring bioterrorism events in large public places such as ports, wharfs and airports, this paper carried out an experimental study on bioaerosol early warning through independently developed bioaerosol telemetry lidar. The system uses the 266 nm and 355 nm double ultra-violet Nd: YAG pulse laser as the emission source. The Cassegrain telescope is used to collect the backward optical signals. After the multi-channel optical spectroscopy, the fluorescence and Raman scattering signals are detected by Hamamatsu H10720 photomultiplier tube (PMT) and the dual-MCP single-photon ps gated ICMOS camera. Qualitative, distance and quantitative analysis of aerosol were conducted by double reconstruction and comparison of fluorescence spectrum and multi-channel PMT detection data. Aerosol types can be identified through sampling and analysis of the airspace where the aerosol is located by unmanned aerial vehicle (UAV). In the experiment, a concentration of 100 mg/L tryptophan aerosol was set at distances of 200 m and 800 m, and the aerosol telemetry lidar system could achieve 70% accuracy of early warning and 90% accuracy of range and azimuth. Combined with UAV sampling data analysis, it can achieve qualitative measurement of aerosol types and risk degree within 20 minutes, and timely detect bioterrorist threats.
Keywords laser radar; unmanned aerial vehicle (UAV); multi-channel photomultiplier tube (PMT); bioaerosol
口岸、码头、机场等大型公共场所随时可能面临 生物恐怖袭击的威胁, 释放生物战剂气溶胶是生物 恐怖袭击的主要方式。 生物战剂主要包括 细菌、芽孢、病毒、毒素等,细菌、芽孢、病毒是有生命的物质,一旦进入机体,即能大量繁殖,其代谢产物能破坏机体的正常功能,导致发病或死亡;毒素是细菌或真菌在一定条件下产生的有毒蛋白质,没有生命,很少量即能引起人、畜中毒或死亡。利用气溶胶方式施放生物战剂可提高生物武器的威力,含有生物战剂的固体或液体微粒分散在空气中形成生物气溶胶,生物气溶胶粒径在 0.01 ~ 50 μ m 之间,能够长时间悬浮在空气中,一定粒径的生物气溶胶颗粒能够直达肺部毛细支气管和肺泡,使人致病。
为应对生物恐怖袭击的威胁,及时侦测和鉴别生物气溶胶,人们研发了生物气溶胶报警器、生物气溶胶采样器、生物战剂侦检仪,以及一体化的生物气溶胶自动鉴别系统等产品。这些产品通过监测空气中微生物浓度的变化并对预警区域采样,将样品液输送到检测单元,对生物战剂、常见的微生物和传染病特性快速自动鉴别。
目前,我国对于生物气溶胶的实时监测预警技术手段主要依赖于上述 抽气式的生物气溶胶点监测器,其监测范围小 ,受气流速度影响大,且大范围部署成本高,存在明显不足。 开展基于激光雷达和无人机的生物气溶胶监测技术研究,其目的是弥补生物威胁的实时预测预警技术的不足,将生物气溶胶遥测激光雷达、无人机采样与本地鉴别技术联用,实现对生物威胁的大范围监测与报警功能,能够更好地保护公共安全,防止生物恐怖袭击危害的发生。
1 技术路线
1.1 生物气溶胶遥测激光雷达
生物气溶胶遥测激光雷达采用激光诱导荧光( LIF )技术 [1] 对空气中的生物气溶胶颗粒进行探测,该生物气溶胶颗粒包括细菌、病毒、芽孢、毒素等生物有害因子。当激光束照射到生物物质分子时,分子发生振动或者因吸收能量处于激发态,被分子散射的光波发生频率变化或不稳定,从而退出激发态,发出比入射光波长长的光波,生物气溶胶含有色氨酸、烟酰胺嘌呤二核苷酸、 核黄素等成分,它们在不同的紫外激发波长下具有不同的荧光光谱,例如,在 266 nm 紫外光激发时,分别产生峰值波长为 280 nm 、 340 nm 和 450 nm 等 [2] 。而非生物气溶胶粒子大多只有本征散射,没有荧光光谱。少数具有荧光效应的非生物气溶胶粒子不具备稳定的谱线特征,不确定性较大,因此和生物气溶胶在荧光特征上有明显的区别,这为使用光学雷达手段探测生物气溶胶提供了理论支持。
本文采用紫外 266 nm 和 355 nm 双光源激发,使用多通道光电倍增管( PMT )和 ICMOS 相机进行光信号探测。通过特定峰值光波和 ICMOS 相机的荧光全光谱探测,进行双重数据重构比对,以此对生物气溶胶进行准确的判别。同时通过 ICMOS 相机的时延探测 [3] ,依赖 气溶胶米散射信号,氮气振动拉曼信号等分析判断气溶胶云团的距离、性质和浓度等信息。
根据激光大气传输理论、单粒子弹性以及生物荧光的发光原理,激光雷达使用高能、窄线宽的脉冲激光器作为激发光源,通过空气分子和气溶胶颗粒后向散射 [4] 到望远接收系统中,来实现精确的距离分辨以及气溶胶测量。从距离 r 处接收到的后向光功率可表示为
 (1)
(1)
式( 1 )中,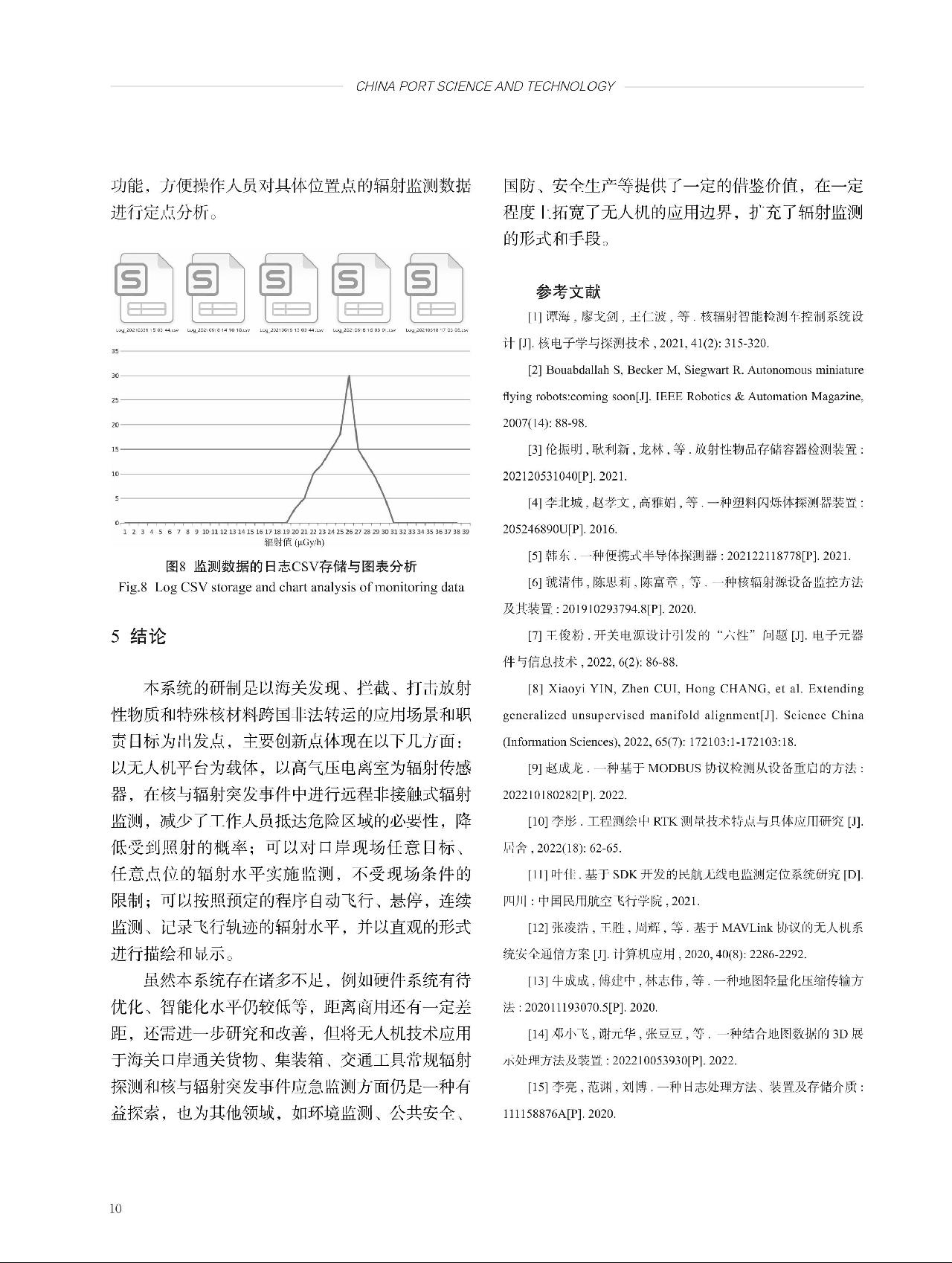 为距离 r 处不同通道探测器接收到的荧光功率,
为距离 r 处不同通道探测器接收到的荧光功率, 为激光发射功率;
为激光发射功率; 为光速;
为光速; 为脉冲激光脉宽;
为脉冲激光脉宽; 为探测器接收孔径角求得的望远镜有效接收面积;
为探测器接收孔径角求得的望远镜有效接收面积; 为大气后向体散射系数;
为大气后向体散射系数; 为荧光效应的有效截面积;
为荧光效应的有效截面积; 为大气中发生荧光效应的分子密度;
为大气中发生荧光效应的分子密度; 为光学系统不同通道的透过率;
为光学系统不同通道的透过率; 为系统的几何重叠因子,它是根据发射和收集系统不同构型以及装调误差所决定的一个函数,通常由实验测得;
为系统的几何重叠因子,它是根据发射和收集系统不同构型以及装调误差所决定的一个函数,通常由实验测得; 为各个探测器通道滤光片带宽;
为各个探测器通道滤光片带宽; 与
与 为发射与回波过程中所有衰减过程的大气消光系数。
为发射与回波过程中所有衰减过程的大气消光系数。
激光雷达方程中包含了气溶胶的消光系数和后向散射系数两个未知量,不易求解。在大气中,氮气在受到激光激发时,会发生一种非弹性的纯分子散射 [5] ,散射光的波长 相对于发射激光的波长
相对于发射激光的波长 发生了位移,而这种位移取决于已知大气密度的拉曼散射。氮气的含量稳定,其后向散射系数可计算得到,则利用振动拉曼散射信号 [6] 可求解消光系数。
发生了位移,而这种位移取决于已知大气密度的拉曼散射。氮气的含量稳定,其后向散射系数可计算得到,则利用振动拉曼散射信号 [6] 可求解消光系数。
拉曼激光雷达方程可表示为
 (2)
(2)
式( 2 )中, 为距离 r 处接收到的拉曼波长
为距离 r 处接收到的拉曼波长 功率;
功率; 是发射波长
是发射波长 的功率,
的功率, 为系统的几何重叠因子;
为系统的几何重叠因子; 为拉曼后向散射 [7] 系数,其中,
为拉曼后向散射 [7] 系数,其中, 为大气中拉曼散射密度,
为大气中拉曼散射密度, 为拉曼后向散射截面,
为拉曼后向散射截面, 是波长
是波长 和
和 处与波长带宽相关的总体消光系数,
处与波长带宽相关的总体消光系数, 为距离的积分变量。假设气溶胶消光与波长的关系为
为距离的积分变量。假设气溶胶消光与波长的关系为 ,用拉曼激光雷达方程可以求解出气溶胶在发射激光波长处的消光系数
,用拉曼激光雷达方程可以求解出气溶胶在发射激光波长处的消光系数
 (3)
(3)
式( 3 )中, 。分子消光系数可以由瑞利散射系数和从模型或对空测量中得到的大气数密度剖面计算出来。
。分子消光系数可以由瑞利散射系数和从模型或对空测量中得到的大气数密度剖面计算出来。
通过检测拉曼散射光,可以确定独立的气溶胶消光剖面 [8] 。我们也可以使用这些信息来推导气溶胶的后向散射,而不需要任何关于消光 - 后向散射比 [9] 的假设,这是一个重要参数,因为它直接关系到粒子的微物理性质。然后通过在高度 和校准高度
和校准高度 处形成弹性和拉曼后向散射信号的比率来计算后向散射剖面,并解 算出高度
处形成弹性和拉曼后向散射信号的比率来计算后向散射剖面,并解 算出高度 处气溶胶后向散射值
处气溶胶后向散射值 。本文中使用 ICMOS 相机对全光谱进行探测,并对氮气拉曼峰进行数据提取,以此对大气消光系数进行计算,再配合荧光通道,共 同构成以拉曼和荧光光谱联用的生物气溶胶遥测激光雷达。
。本文中使用 ICMOS 相机对全光谱进行探测,并对氮气拉曼峰进行数据提取,以此对大气消光系数进行计算,再配合荧光通道,共 同构成以拉曼和荧光光谱联用的生物气溶胶遥测激光雷达。
1.2 系统组成
如图 1 所示,生物气溶胶遥测激光雷达系统 [10-11] 主要由伺服系统、发射系统、信号接收与分光系统、探测器系统、数据采集与处理系统 [12] 、数据发射系统组成。发射系统由 266 nm 和 355 nm 两个 Nd : YAG 激光器、两个激光扩束准直器、双光合束发射系统、激光脉冲计数 DET 组成;信号接收系统由卡塞格林望远镜与多模光纤组成,分光系统包括全光谱与荧光特征峰提取两部分,由一系列二向色镜 LP1 、 LP2 、 LP3 和带通滤波片 LF1 、 LF2 、 LF3 、 LF4 ,聚焦镜 FL1 、 FL2 、 FL3 、 FL4 ,以及陷波滤波片、离轴抛物面镜、耦合光纤、分色仪等组成;采用 ICMOS 相机对全光谱进行扫描探测,同时采用 4 个 PMT 对荧光特征光功率进行探测;数据采集与数据处理系统由工控机和高速服务器主机电脑组成。系统主要配置如表 1 所示。
表1 系统主要配置参数表
Table 1 Main configuration parameters of the system
模块 | 主要器件 | 项目 | 主要参数 |
光学 | Telescope | 波长范围 | 250 ~ 750 nm |
Nd : YAG 激光器 | 脉宽 | < 18 ns | |
spectrometer | 分辨率 | 500 ~ 0.17 nm | |
扫描 | High precision turntable | 步进精度 | 0.1°/s |
探测器 | ICMOS Camera | 接口 | C-Mount/F-Mount |
PMT4 | 波纹噪声 | 0.1 mA | |
DET | 暗电流 | 0.3 nA (Typ.) | |
传输 | Wireless communication | 输出方式 | TTL 电平 |
Signal collection boards | 触发方式 | 可编程触发 | |
数据处理 | Control and data processing | 外设通信接口 | RS232 、 USB |
供电 | 电源 | 内置电池 | 72 V/7 Ah |
图1 生物气溶胶遥测激光雷达示意图
Fig.1 Schematic diagram of biological aerosol telemetry lidar
在 266 nm 激光器工作时,激光器出射光经过扩束准直系统 BE1 后由反射镜 S2 反射至长波通二向色镜 S3 ,再通过分光镜 S1 ,脉冲计数光路通过 S1 反射至 DET ,激发光经过 M1 、 M2 发射至气溶胶云团,接收到的回波信号通过 fiber1 传输至分光系统。一部分信号光经过分光镜 S2 反射后,逐一通过 LP1 、 LP2 、 LP3 ,其中 PMT1 采集 266 的米散射信号, PMT2 、 PMT3 、 PMT4 此时分别对应的荧光波段为 290 ~ 390 nm 、 390 ~ 490 nm 、 500 ~ 700 nm ,而透过 S2 的信号光再次通过 266 nm 的陷波滤波片,经过离轴抛物面镜耦合至多模 fiber2 中传输至光谱仪中,以供 ICMOS 相机完成 266 nm 的拉曼和荧光光谱探测。
在 355 nm 激光器工作时,激光器出射光经过扩束准直系统 BE2 后 S3 将由切换机构撤走,激光器出射光经过 S1 一部分反射至 DET 进行脉冲计数,激发光经过 M1 、 M2 发射至气溶胶云团,接收到的回波信号通过 fiber1 传输至分光系统。一部分信号光经过分光镜 S2 反射后,逐一通过 LP1 、 LP2 、 LP3 ,其中 PMT1 此时不发挥作用, PMT2 此时采集 355 激发光在气溶胶返回的米散射信号 290 ~ 390 nm 波段、 PMT3 、 PMT4 此时分别为波段在 390 ~ 490 nm 、 500 ~ 700 nm 的荧光信号。此时 266 nm 的陷波滤波片被切换为 355 nm 的陷波滤波片,透过 S2 的信号光经过 355 nm 陷波滤波片后经过离轴抛物面镜耦合至多模 fiber2 中传输至光谱仪中,以供 ICMOS 相机完成 355 nm 的荧光光谱探测。
图1中接收系统是焦距为 2000 mm ,口径为 φ254 mm 的卡塞格林望远镜,收集视场 [13] 为 2 mrad ,在大约 1.5 mrad 发散激光束中包含超过 97% 的能量。其中激发光的共轴调节由 M1 和 M2 两块多层高反射率紫外介质膜系棱镜组成,将激发光与收集系统调节为共轴系统,改善了系统的重叠因子。发射和望远收集系统通过结构保证相互的定位,通过高精度伺服云台的扫描,以及与采集无人机基站的通信协同,共同构成联动检测系统。
在 266 nm 波长激发下,氮气分子拉曼光谱位移为 2332 cm - 1 ,对应波长为 283.59 nm 。结合米散射信号对不同距离的消光系数进行计算。增加 DET 以实现激光脉冲计数,达到对 ICMOS 相机的时延开启,结合 ps 级高精度门控,达到对空间距离的高精度划分。
使用 ps 门控技术能够有效抑制荧光以及日光等背景的干扰,得到优质的拉曼信号。当使用荧光光谱时,又能将拉曼与荧光区进行区别,防止不同信号的干扰。通过调节 PMT 与 ICMOS 相机增益,配合多路 ADC ,能够实现宽动态范围信号采样,在荧光光谱与多通道的 PMT 结合下,能更加准确地对气溶胶的特性进行判定。
1.3 生物气溶胶无人机采样与侦测系统
生物气溶胶遥测激光雷达探测到有威胁的生物气溶胶云团,获取生物气溶胶云团坐标后,还需要无人机搭载的生物气溶胶采样检测系统快速前往有威胁的生物气溶胶云团所在坐标进行生物气溶胶的采样和侦检。本节主要描述了无人机生物气溶胶采样系统的构成、采样流程和侦检流程。
1.3.1 系统构成
系统使用 MD4-1000 多旋翼飞行无人机作为气溶胶取样器的空中搭载平台 [14] ,见图2 。此无人机最大载重为 5 kg ,可提供 360 ° 全景观测,具有数字图传、自动避障、路径规划等功能,无人机上搭载了气溶胶采样器、控制器及无线通信模块。控制器通过 RS232 接口连接并控制 AS-1000 气溶胶采样器,并且通过无线通信模块与地面指挥平台通信。为了保证悬停时间充足,气溶胶采样器选择结构简单的大流量滤膜采样器,重量在 3 kg 左右,使用驻极体滤芯(图 3 )搭配高速离心机,保证了流量( 50 ~ 300 LPM )和采集效率( 50%@0.5 µm , 75%@1.0 µm , 90%@ > 2.0 µm )。驻极体滤芯通过静电采集,避免了巨大冲击,且填充率较低,约为 4% ,样流经过滤芯的速度与面速度相差较小,减小了对微生物活性影响。采集气溶胶样品后,使用 HJ4-3000 生物战剂侦检仪完成对气溶胶的定性和定量检测。

图2 改装的四旋翼无人机
Fig.2 Modified Quadrotor UAV
图3 驻极体滤芯
Fig.3 Electret filter
1.3.2 多架无人机自组网
气溶胶遥测激光雷达云台扫描转速控制可在 1 ~ 8°/s 之间进行选择,步进精度为 0.1°/s ,为了快速地完成对所在空域的扫描,特配备两台激光雷达分别对 90° 半空域警戒扫描。
雷达与无人机配联动时,为了有效组织和保证无人机与指挥平台之间的通信,采用无线自组网技术。无线自组网技术的网络结构分为平面结构和分簇结构 [15] 。平面结构中所有无人机角色对等,适合无人机节点有限,分布简单的无人机网络,具有较强鲁棒性和较高安全性,但无法适应网络中存在大量无人机节点的情况;分簇结构中无人机分为不同角色,组成多个子网络,适用于网络中存在大量无人机节点的情况,但增加了系统的复杂度。考虑到实际部署的无人机数量通常较少( < 20 台),以及制系统的复杂度,本系统用平面结构作为无线自组网的网络结构。

图4 气溶胶遥测雷达与无人机联合监控示意图
Fig.4 Schematic diagram of aerosol telemetry radar and UAV joint monitoring
2 实验数据分析
2.1 实验方案
为了准确反映气溶胶遥测激光雷达不同距离下的性能,实验地点为上海浦东,方向为水平正东 0 ° 方向,海拔为 50 m 。分别使用 266 nm 拉曼和 355 nm 激光对 200 m 、 800 m 距离的气溶胶消光系数反演计算,再通过多通道 PMT 完成对生物荧光检测。
具体流程如图 5 所示, 在一个未知区域,首先对云台进行归零校准,以校准的零位为基准,结合云台的旋转精度完成对空间的划分和空间坐标标定。雷达启动后,首先开启 266 nm 激光器,通过 ICMOS 对氮气拉曼峰荧光和米散射测量。切换 355 nm 激光器,完成对生物气溶胶云团的荧光和米散射采样,信号如果异常,将生物气溶胶云团坐标信息通过指挥平台传递给无人机基站,无人机飞往云团坐标处,到达后悬停。开始悬停后通知指挥平台确认,启动气溶胶采样器进行采样,采样持续 3 min 后停止采样并返航,或指挥平台中途停止采样并返航。返航后通过生物战剂侦检仪完成气溶胶成分比例测定。
图5 雷达与无人机协同工作流程图
Fig.5 Flow chart of radar and UAV cooperation
2.2 实验分析
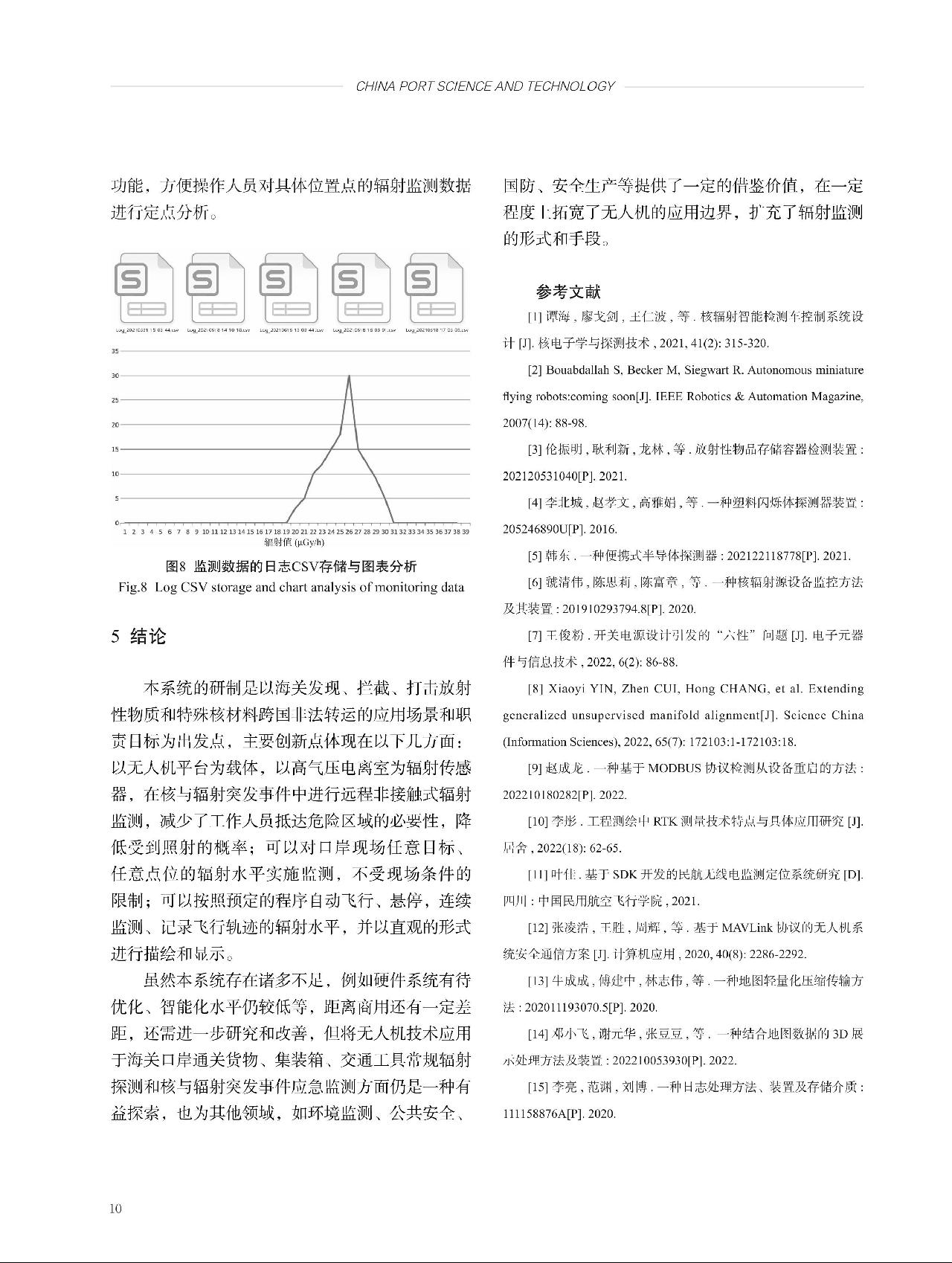
采用图 1 所示的激光雷达系统对色氨酸气溶胶 [16] 进行了测试,色氨酸气溶胶浓度为 100 mg/L ,分别切换 266 nm 和 355 nm 激光器,在 200 m 区域内设置气溶胶云团,测试结果如图 6 所示。 266 nm 时,色氨酸的特征荧光峰位于 350 nm 左右, PMT2 通道在 200 m 信号强烈,由于雾化器所设置的气溶胶云团在气流中的浓度不稳定,所显示的信号在 200 m 的区间高低不一,且曲线中出现了阶梯性的上升和下降情况,同时在激光路径方向上气溶胶散布距离扩大。根据回波信号测量,宽度达到了 80 m ,与实际误差在 10% ,随着距离的增加信号变得有噪声,信号强度下降,但是通过分析荧光光谱,还是可以确定生物气溶胶的存在。通过 ICMOS 相机光谱显示,如图 7 所示,在 310 ~ 440 nm 波长范围内,荧光信号与实验室色氨酸荧光光谱预期达到一致。无人机对采集样品的测试数据如图 8 所示,能够准确确定其种类。
图6 200 m处色氨酸气溶胶在紫外激光激发下不同波段回波信号曲线
Fig.6 Signal curves of tryptophan aerosol under UV excitation light at 200 m
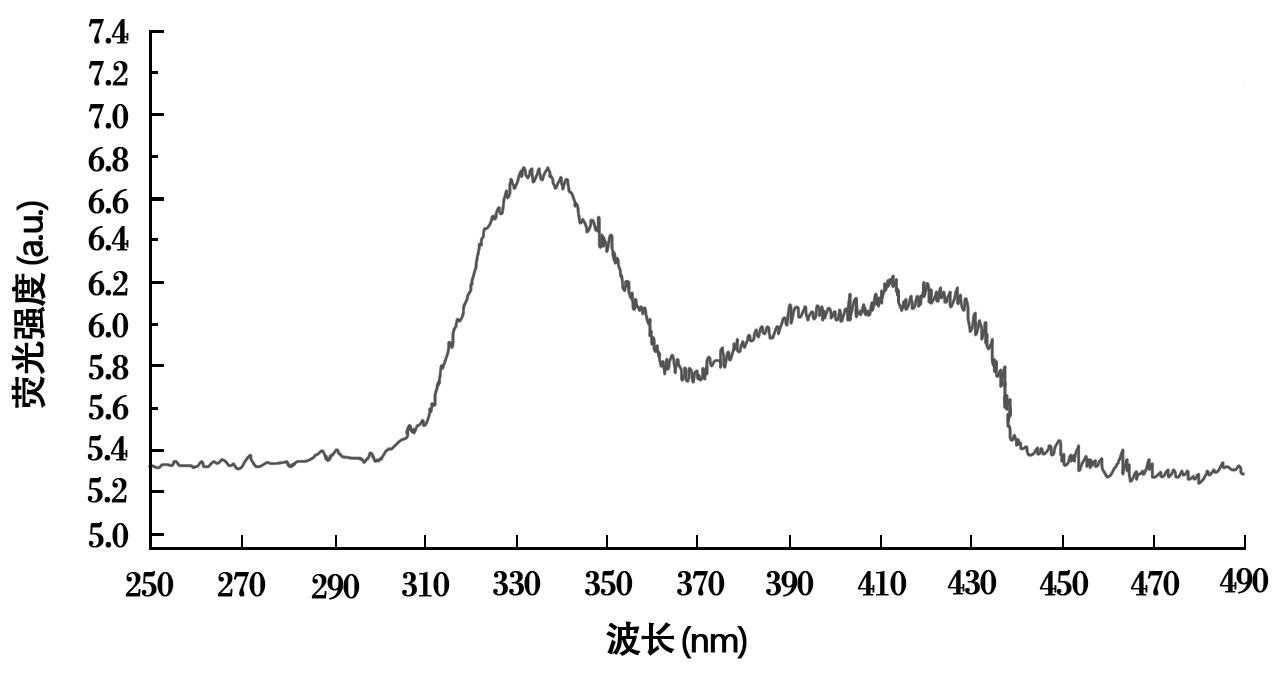
图7 200 m气溶胶云团ICMOS相机荧光光谱曲线
Fig.7 Fluorescence spectra of 200 m aerosol cloud by ICMOS camera
在 800 m 区域内设置气溶胶云团,测试结果见图 9 。 PMT2 通道在 800 m 信号强烈,由于距离的增加,色氨酸气溶胶在同样的浓度下,信号值明显偏小,且噪声有所增加。在 PMT1 米散射通道, 在气溶胶雷达和色氨酸气溶胶之间的距离上,由信号可以看出,米散射噪声整体有所增加,个别距离点 十分突出,形成尖峰,推测原因可能是人为走动扬尘所致。根据回波信号测量,色氨酸生物气溶胶在 800 m 处宽度为 120 m ,与实际误差在 10% 以内。通过分析荧光光谱曲线,在 310 ~ 435 nm 波长范围内,荧光信号与实验室色氨酸荧光光谱预期达到一致,达到了测试的预期目的,见图 10 。无人机对采集样品的测试数据能够准确确定其种类,如图 11 所示。
图8 200 m 样品HJ4-3000生物战剂侦检仪检测结果
Fig.8 Results of HJ4-3000 biological warfare agent detector for 200 m samples
图9 800 m处色氨酸气溶胶在紫外激光激发下不同波段回波信号曲线
Fig.9 Signal curves of TRP aerosol at 800 m under UV excitation light
图10 800 m气溶胶云团ICMOS相机荧光光谱曲线
Fig.10 Fluorescence spectrum curve of 800 m aerosol cloud by ICMOS camera
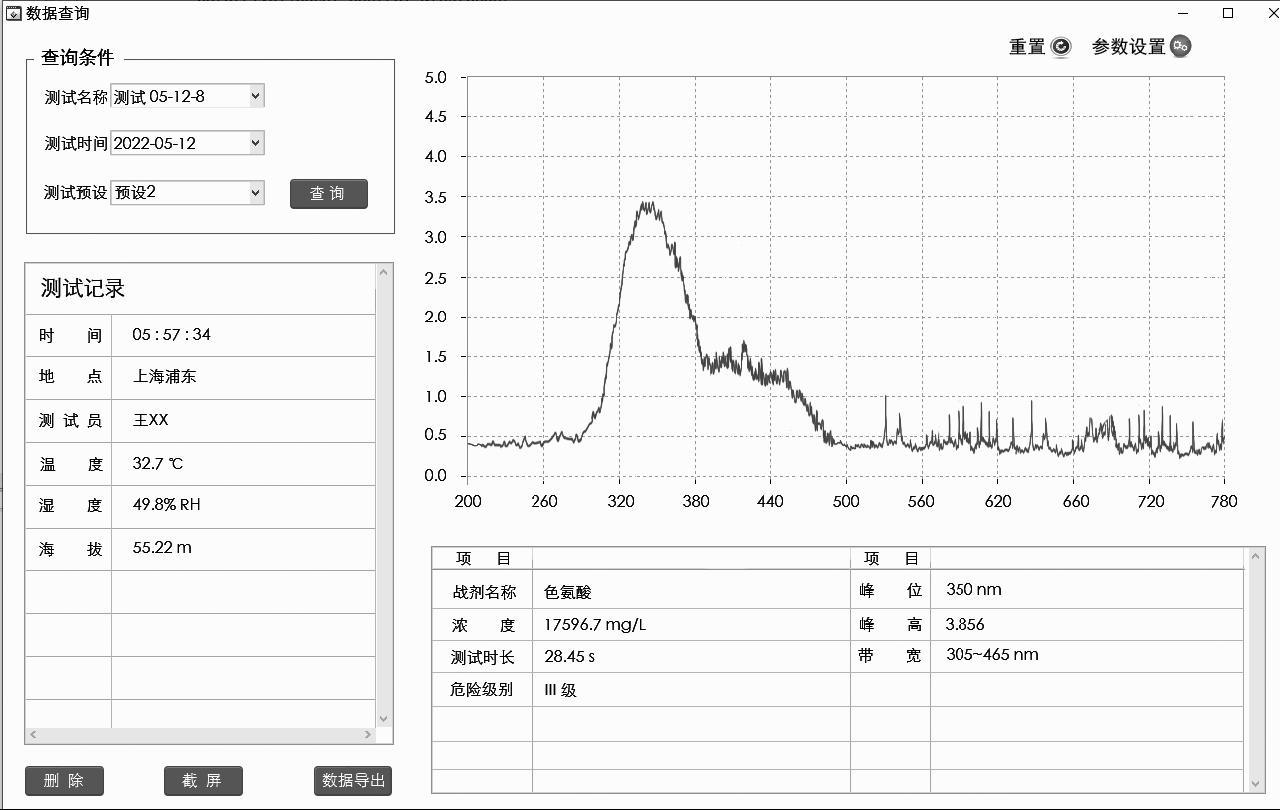
图11 800 m 样品HJ4-3000生物战剂侦检仪检测结果
Fig.11 Results of HJ4-3000 biological warfare agent detector for 800 m samples
3 结论
本文研究了基于激光雷达和无人机的生物气溶胶监测系统技术原理与实现方法,采用激光诱导荧光技术和时间ps门控拉曼光谱技术进行双重数据重构比对构建生物气溶胶遥测激光雷达。文中基于266 nm和355 nm双紫外Nd:YAG脉冲激光发射源,采用卡塞格林望远收集系统和多通道PMT、ICMOS相机为探测手段,实现了200 m和800 m的色氨酸气溶胶生物和非生物气溶胶的精准探测。实验中在200 m和800 m距离设置色氨酸气溶胶浓度为100 mg/L,系统能够准确识别生物和非生物并预警,准确率达到了70%,距离和方位精度达到了90%。通过与无人机对威胁空域采样,生物战剂侦检仪对样品检测能够在20 min内实现气溶胶的种类以及危险程度定性测量,能够及时发现生物恐怖威胁。
参考文献
[1]杨辉, 赵雪松, 孙彦飞, 等. 生物战剂气溶胶激光雷达遥测技术研究[J]. 应用光学, 2016, 37(6): 783-788.
[2]王强, 何廷尧, 华灯鑫. 不同紫外波段激发生物气溶胶荧光雷达系统性能分析[J]. 光子学报, 2017, 46(12): 139-146.
[3] Anita Hausmann, Frank Duschek, Thomas Fischbach, et al. classification of biological aerosols using laser induced fluorescence (LIF) technique[C]. Chemical, Biological, Radiological, Nuclear, and Explosives (CBRNE) Sensing XV. SPIE, 2014, 9073: 232-239.
[4] Per Jonsson, Göran Olofsson, Torbjörn Tjärnhage, et al. Lidar [M]. Physical and Biological Properties of Bioaerosols: Springer, 2006: 105-141.
[5] Per Jonsson, Göran Olofsson, Torbjörn Tjärnhage, et al. Bioaerosol Detection Technologies[M]. New York: Springer, 2014: 33-48.
[6] Noah S. Higdon, Edward V. Browell, Patrick Ponsardin, et al. Airborne differential absorption lidar system for measurements of atmospheric water vapor and aerosols[J]. Applied optics, 1994, 33(27): 6422-6438.
[7] Volker Matthais , Volker Freudenthaler, Aldo Amodeo, et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 3. Raman lidar algorithm for aerosol extinction, backscatter, and lidar ratio[J]. Applied optics, 2004, 43(28): 5370-5385.
[8]闫顺生, 胡顺星, 胡欢陵, 等. Raman激光雷达探测气溶胶消光系数求解新方法[J]. 应用光学, 2008(3): 433-435.
[9] Julian W. Tang. The effect of environmental parameters on the survival of airborne infectious agents[J/OL]. https://ou-publier.cirad.fr/index.php/en/node/5445: S737-S746.
[10] Schmitt Randal L, Sickafoose Shane M, Johnson Mark S, et al. Remote Sensing for Bio-Aerosol Detection[R/OL]. https://www.osti.gov/servlets/purl/1326769, 2015-08-15.
[11] Ann M Womack, Brendan J M Bohannan, Jessica L Green, et al. Biodiversity and biogeography of the atmosphere. Philos T R Soc B 365(1558): 3645–3653. DOI: 10.1098/rstb.2010.0283.
[12]曹念文, 杨丰恺, 施建中, 等. 南京地区低空雾霾气溶胶的拉曼-瑞利-米激光雷达测量[J].应用光学, 2012, 33(5): 979-984.
[13]景敏, 华灯鑫, 乐静,等. 激光诱导荧光雷达探测系统仿真研究[J]. 应用光学, 2017, 38(1): 131-135.
[14] Paul Bieber, Teresa M Seifried, Julia Burkart, et al. A Drone-Based Bioaerosol Sampling System to Monitor Ice Nucleation Particles in the Lower Atmosphere[J]. Remote Sensing, 2020, 12(3): 23-26.
[15]黄巍, 陈俊良, 李犹海,等. 无人机自组网技术综述与发展展望[J]. 电讯技术, 2022, 62(1): 138-146.
[16] Subodh Kumar, Abhishek Parmar, Ramesh C Sharma, et al. Remote sensing of biochemicals in aerosol form using fluorescence sensor for defence and security[J]. IEEE Sensors Journal, 2019, 19(23): 11129-11133.
