CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

无线图传技术无人机 在大宗商品水尺计重中的应用
作者:王猛 刘进涛 刘冲伟 王晨钢 郭晓艳 吴海斌
王猛 刘进涛 刘冲伟 王晨钢 郭晓艳 吴海斌
无人驾驶飞机(Unmanned Aerial Vehicle)简称“无人机”[1],无人机技术除应用于军事用途外,近年来随着该领域科技的蓬勃发展,凭借智能化程度高、操纵便捷等优点,使其在船载大宗商品水尺计重领域获得了极大的关注和应用[2-5]。基于自身搭载的云台系统及无线图传功能,无人机(特别是悬停稳定性较好的多旋翼无人机)为水尺计重提供了低成本、省时省力、机动程度高的船舶吃水数据观测的便利方法,为海关提供了一种口岸水尺计重执法工作的新型支撑手段,以其空中数据影像采集终端的优势,便捷地实现了船舶吃水数值的实时监测、采集、读取和视频保存。
本文作者长期跟踪和研究无人机及其图传技术在大宗商品水尺计重中的应用[5],希望借此将无人机当成移动空中传感器并使其成为互联网的一个节点,将其所采集的数据与互联网相融合应用到海运大宗散货的船舶水尺计重测量当中,发挥互联网与无人机在水尺探测领域的整合与提升功能,分析建立一套互联网和无人机技术为基础的海运大宗散货的水尺计重方法,进而优化和提高了水尺计重的创新力和生产率,提高海关口岸执法质量和工作效率,更好地为对外贸易经济发展服务。
1 水尺计重的原理和一般方法
水尺计重法(Draft survey)具有省时、省力,成本低、操作迅速等优点,在国际贸易上被用于铁矿、煤炭、铝土、化肥、粮食等货值较低的大宗产品的计重中。其基本计算原理应用了阿基米德定律(Archimedes' principle)。简单说来,计重过程为分别观测承运船舶装/卸货前后艏、舯、艉的六面吃水数值(图1),计量船用燃油、压载水和淡水的储存量,并依据船舶的排水量/载重量表、水油舱计量表和各类校正表等,经各种纵倾、横倾和港水密度校正后,以确定装货或卸货的重量 [6]。
货轮左右两侧6处吃水数据是后续计算船舶总平均吃水(D/M)数值的前提,因而其观测过程是水尺计重必不可少的步骤。传统的乘坐小船、攀爬软梯等观测岸边外侧吃水的方法则存在耗时长、危险系数高等缺点。因此,各类智能化技术在此领域应用较广[7],其中,多旋翼无人机由于悬停和拍摄云台稳定性高等特点,近年来被广泛用于水尺计重工作中(图2),并成为一种安全、高效的水尺观测方式。
图1 船舶水尺位置及吃水修正示意图
Fig.1 Schematic diagram of ship draft survey position and draft correction

图2 无人机用于水尺计重时的现场照片
Fig.2 Field photos of UAV used in draft survey weighting
2 无线图像传输的技术原理
无人机的图传系统功能就是将飞行器记录的影像发射给操控端遥控接收装置,从而实现现场影像的远程实时观看,将此功能应用于水尺计重工作中就能够在线观测船舶吃水数据。图传系统是无人机最核心的应用功能,有效实现了飞行器与控制端的人机交互。早期的图传设备都是采用模拟图传技术,其特点是将发射端和接收端设置在一个工作频段即可以收到影像和图片,但是该模式信号较差、解析度低、视频带宽小、画质较差,影响飞行安全,故不适合于水尺观测。目前,各民用无人机厂家开发的套机均搭载了机型专用的数字图传功能,如今无人机无线图传大多在2.4 GHz频段以及5.8 GHz的信号频段工作,见图3。无线图传应用较多的主要有Lightbridge与Wi-Fi两种传输技术。
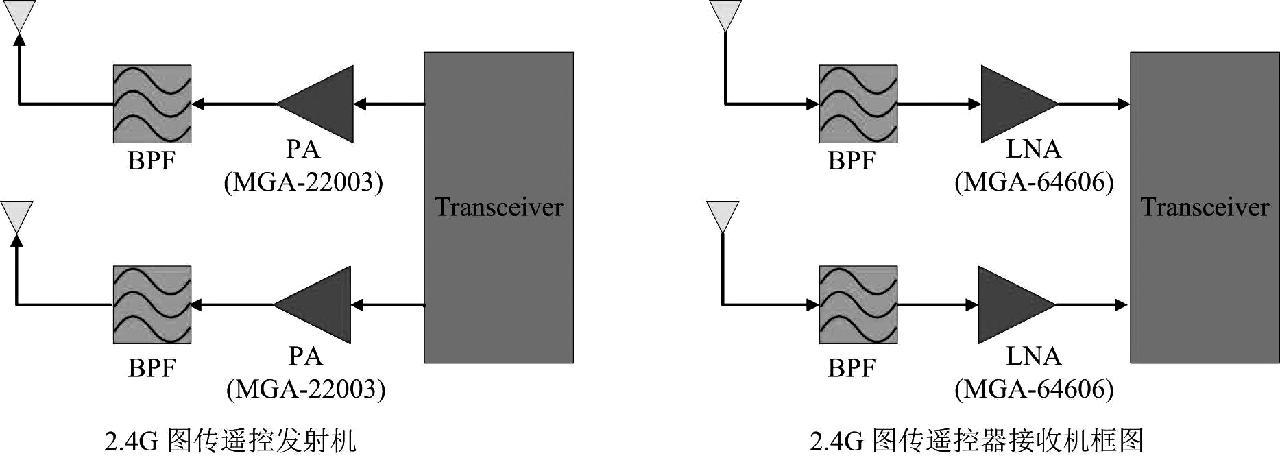
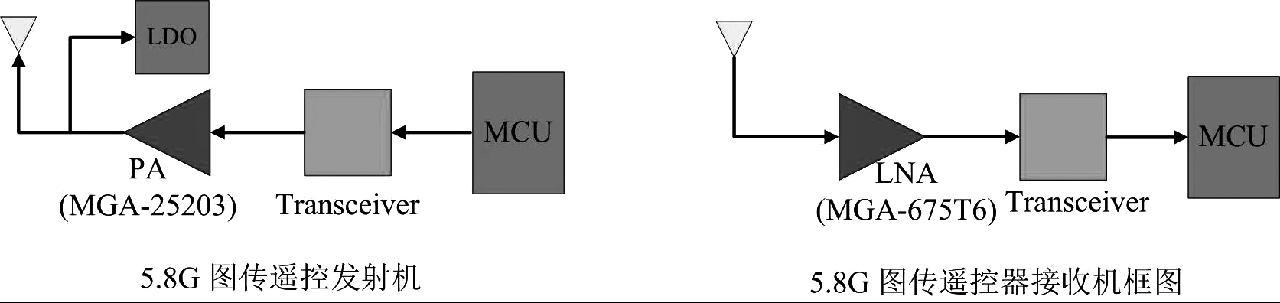
图3 无人机常用数字图传方案
Fig.3 Common digital image transmission scheme for UAV
在水尺观测实际工作中,无线图像传输的解析度、流畅度和可靠性对吃水值读取的精度准确度有重要作用。以下是通过分析数字传输中常用的两种技术的利弊,选取适合无人机水尺观测的传输技术方案。
2.1 Wi-Fi图传技术
将Wi-Fi图像信号发射器连接到飞行器云台搭载的摄像头视频输出端口上,同时,在终端接收器上设置信号接收天线,然后将信号转码到终端显示器上即可实现Wi-Fi无线图传[8]。Wi-Fi图传利用无线信号进行传输,但由于其遵循传输控制协议/网际协议(TCP/IP协议),在运行中首先建立起信号接收端和发射端的双向握手身份认证,然后以定长512字节数据包进行传输,若数据大于512字节,将分成多个数据包逐个进行传输。在此数据传输机制下,每个传输的数据包必须是完整无误的,一个字节的丢失将导致整个数据包的重新发送,一旦所传输的数据发生错误或传输过程丢失将会重新发送整个数据包,确认接收的整个数据包无误后方开始进行下一个数据包的传输,这个过程必然会浪费时间。从数据传输角度看,Wi-Fi传输算是速度比较快的无线传输技术,但是由于无人机FPV飞行(第一视角飞行)对实时性要求很高,这种基于TCP/IP协议下数据包的重新发送无法让操控者实时观看现场影像和画面。
2.2 Lightbridge图传技术
Lightbridge是DJI首款全高清数字图像传输系统,对行业的发展产生了积极的推动作用。它是基于2.4 GHz或5.8 GHz频段的单向图像数据传输,类似位于高处的电视广播塔的数据传输形式[9],抗干扰能力较强,同时内置2.4 GHz遥控器链路和OSD飞行数据叠加系统,最高可传输1080 P的全高清图像数据,实测有效传输距离高达1.7 km,使用的距离是一般普通Wi-Fi图传的2~3倍,图传延时在100~200 ms之间,实现了传输延时最小化和传输距离最大化,因此更适合在电磁环境复杂的大型船舶水尺观测工作中使用。我们在实际应用中用到的图传技术即为该数字图传方式。
3 多旋翼无人机(multi-rotor UAV)
多旋翼无人机是通过几个定距螺旋桨(推进器)的正反转和速度控制来提供飞机升力和飞机姿态调整的飞行器。其多对旋翼中的每对旋翼都转向相反时抵消彼此反扭力矩,从而很容易产生同一方向的气流推力,因此具有优秀的定点悬停能力,这是一般固定翼无人机无法企及的。与固定翼飞机相比,其可以垂直起降、定向盘旋,而且机械结构简单、安全性高、灵活机动、悬停稳定,使用成本低。基于以上优点,近年来应用于水尺计重中的无人机多为此类,其中最常见的为四旋翼(quadrotor)。由于形体较小、价格较低的特点,使其具有十分广阔的应用前景[10]。四旋翼无人机结构示意图见图4。
多旋翼无人机的飞行控制系统是无人机在实际使用中面临的重点问题。无人机飞行器在升空和巡航过程中会面临诸如声波干扰、无线电干扰、磁场变化、弱光线、强风、气流等的各种外部因素影响,这将会严重影响其飞行稳定性,甚至导致“炸机”危险,因此,实际操作中的控制技术便显得尤为重要。常规的类似汽车式的遥控方法主要针对其飞行高度、速度、姿态等,此外,还有一些用于航向、方位、定点跟踪以及3D轨迹跟踪的智能化方式。目前,主流的控制技术主要包括基于理论的飞行控制技术、线性模型预测控制技术、非基于模拟的非线性控制技术等[11-13]。
4 水尺观测的实际操作
选择开阔适宜的起飞位置,检查装配零件是否牢固,电量是否充足,开机后起飞前进行指南针和IMU的校准。起飞后利用地面站的远程操控装置遥控飞行器飞至所要观察的水尺标记前方合适位置并悬停,开启视觉定位模式和视频录制功能,通过无人机云台搭载的高清影像探头,录制水面在水尺标记处波动的影像,并使用无线图传功能在遥控终端进行查看并录制和读取数据。为保证准确度和精度,飞行器在每处水尺位置停留时间不能少于1~2 min[3]。
5 飞行安全注意事项
由于无人机客观存在一定的局限性,如抗风能力差、防水性能差、电池续航时间短、抗电磁干扰能力差等[2],并且其在高空运行时,一旦失控坠机可能会对周围人群造成伤害,因此实际操作中需要注意飞行安全[5]。
5.1 注意防风和防水
由于小型无人机的体型和载重量小,在风力较大的空旷海域作业时飞行器稳定性容易受干扰,不可避免地会受到风力的影响产生漂移和坠机危险。因此应适当提高飞行高度,增加与障碍物(船体)安全距离,延长悬停时间,避免飞行器超出视线飞行,并时刻注意电量、速度、位置和信号强度,若有特殊状况及时就近紧急降落。
普通无人机一般不具备防水和水面漂浮能力,一旦坠水将会造成经济损失。实践中发现,由于飞行器飞行过程与水平面有一定的俯仰角,实际高度受力矩影响比显示值略低,所以飞行时与水面要保持足够的距离。实际作业时,即便在风浪较小的情况下,飞行器与水面距离至少也应保持1 m距离。
5.2 与船体和机械设备保持安全距离
不同于军舰,普通货轮的磁场可能会对无人机的GPS和无线信号产生严重干扰,使得飞行器不由自主地发生漂移并失去控制,环境周围附近的港口大型机械设备也会因此产生影响。所以,飞行器巡航中应与船体及钢铁设备保持足够距离以保证飞行安全,巡航及悬停时必须与船舶外壁保持3 m以上的安全距离,在距船舶很近的航行活动中,无人机必须在视野范围内作业,同时尽量低速运行以防止漂移撞机。
5.3 飞行器远离人员飞行
民用多旋翼无人机螺旋桨的转速可达5000~6000 r/min,飞行速度最高可达50 m/s, 加之其重量的关系,潜在破坏威力非常大,如果在人较多的地方飞行,一旦发生事故,会造成割伤或砸伤,损失难以估量。港口飞行时要时刻注意码头人员和船上甲板作业船员,避免向人群处近距离飞行。飞行器返航降落时,注意与操作人员保持一定距离,避免造成生产事故。市面上常用无人机多设定了空中紧急停机功能,一旦飞行器受干扰脱离控制冲向人群,要谨遵“人比机重要”的原则,实行紧急迫降。
6 无人机水尺观测数据的效率及精度
6.1 无人机观测效率
为验证无人机观测效率,研究选取了同一泊位的5艘次散货船,观测点选取了船舯外舷,船长度在300~320 m,吃水深度在18~20.5 m,观测泊位天气状况较好,海面波浪在10 cm以内。经过测试,无人机从甲板起飞比检验员从甲板攀爬软梯观测节省时间超过80%,这还未将收放软梯的时间计算在内,详细测试数据如表1所示。
表1 不同观测方式所用时间统计
Table 1 Time statistics for different observations
观测方式 | 观测总时长 (min) |
甲板起飞 | 6 |
岸上起飞 | 9 |
人工攀爬软梯 | 32 (不含船方帮扎软梯及攀爬时间) |
驾驶小艇观测 | 45 (含等待小艇靠岸及登船下船时间) |
6.2 无人机观测精度
水尺计重的准确度客观影响因素较多,无人机图传技术的应用与人工观测毕竟不同,其观测精度是检验人员关心的重要问题。借助无人机远程图传技术,实际上是把无人机作为人眼的延伸,理论上其观测的精度与检验员直接观测精度一致。为验证观测结果的精度,我们进行了如下测试比对:安排2名检验员使用小艇抵近大船进行水尺标记分别观测并记录下吃水数据,再使用无人机对同一水尺标记进行观测并录像,然后由另外2名检验员读数。结果显示:使用无人机在距离水尺标记5 m、距离水面1.5~2 m时,4人平均读数一致(表2),这足以说明图传技术的即时效果完全可以满足要求。
表2 不同观测方式的观测结果
Table 2 Observation results of different observation methods
检验员 | 无人机远程观测吃水值 (m) | 使用小艇观测吃水值 (m) |
检验员A | 12.29 | — |
检验员B | 12.29 | — |
检验员C | — | 12.30 |
检验员D | — | 12.28 |
7 结论
随着水运方式在现代大宗散货交易中比重的进一步增加,水尺计重的作用越来越突出。常规的吃水观测方法费时多、投入大,安全隐患多,加之当前疫情防控常态化,免于登轮(尤其外籍货轮)的无人机观测技术在观测船舶吃水方面的作用日益凸显。其操作的便捷性,图像回传的高清性、稳定性以及可保存性,可以用来提升海关水尺观测的工作质量和工作效率,应用前景广阔。
参考文献
[1] 梁瑞彪.浅析多旋翼无人机在水域环境监测中的应用[J].中小企业管理与科技 ( 上旬刊 ), 2016, 11: 146-147.
[2]黄彪斌, 赖华海, 周立群, 等. 无人机在水尺计重领域的应用[J].中国水运, 2020(12): 77-79.
[3]无人机在水尺计重中的应用规程: SN/T 5314-2021[S].北京:中国标准出版社, 2022.
[4]姜莉, 姜海航, 王行正, 等. 船舶水尺计重应用研究[J].中国口岸科学技术, 2021, 3(12): 40-44.
[5]刘进涛, 张祥龙, 李雁宁. 基于无线图传技术的多旋翼无人机在口岸水尺鉴重中的应用研究[J].军民两用技术与产品, 2018(3): 61-63.
[6] 进出口商品重量鉴定规程: SN/T 3023.2-2021[S].北京:中国标准出版社, 20 22.
[7]张帅, 朱学海, 罗陨飞.船舶水尺智能技术识别技术的研究与进展[J].检验检疫学刊, 2019, 1(29): 101-104.
[8] 王鹏 , 徐莹 , 徐岩 , 等 . 基于 Wi-Fi 的嵌入式无线图像监控系统设计 [J] .单片机与嵌入式系统应用 , 2013, 13(10): 57-59.
[9] Yuan D, Walsh R W. Abnormal oscillation modes in a waning light bridge[J]. Astronomy & Astrophysics, 2016, 594: A101.
[10]钟佳朋.四旋翼无人机的导航与控制[D].哈尔滨: 哈尔滨工业大学 , 2010.
[11] 曾庆华,张为华.无人机飞行控制系统实验教程[ M ].北京:国防工业出版社, 2011: 4-5.
[12]黄智,刘元魁.无人机的飞行控制系统研究 [J]. 电子技术 , 2021, 50(8): 42-43.
[13]庄淡盛. 数字式无人机飞行控制系统的实现 [J]. 电子技术与软件程 , 2021(19): 109-110.
