
CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

空港口岸模块化机器人的设计与“中心+现场”应用
作者:汪洋 陈光明 姚宇骏 宋闯 吴苏唯 厉和
汪洋 陈光明 姚宇骏 宋闯 吴苏唯 厉和
�近年来,为应对日益增加的旅客和货物吞吐量,同时满足日益细化的监管作业要求,空港口岸开始尝试使用机器人辅助海关关员进行作业。尤其是遇到涉疫航班,由于要进行封闭式作业,人工的压力、交叉感染的风险陡然增加,口岸一线对无人化、智能化设备的需求愈发强烈。鉴于此,本研究针对空港常见的几种业务场景,设计研发了模块化机器人平台,辅助关员进行旅客问询、卫生检疫、消杀监督、人货通关等工作。机器人平台的结构和性能可以适应空港较平整的地面,以及复杂网络信号的环境。机器人采用模块化设计,通过组合特定功能模块,应用于不同的业务现场,减少重复配置新机器的浪费。
1 材料与方法
机器人平台采用模块化设计,主要分为7个部分:智能底盘、5G/4G通讯模块、监控摄像头模块、遥控及自主导航模块、电池及自动充电模块、业务相关装备和监控指挥云平台软件。机器人平台的硬件结构如图1所示。
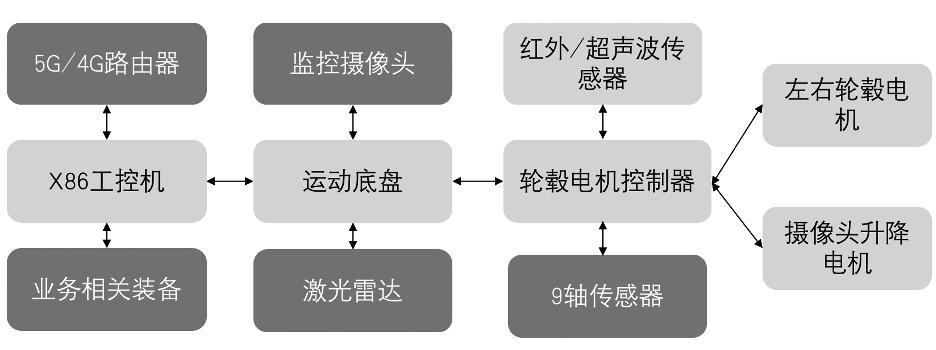
图1 模块化机器人平台结构框图
(浅灰色模块为智能底盘)
Fig.1 Modular robot platform block diagram (light gray modules indicate the intelligent chassis)
1.1 智能底盘模块
智能底盘模块为机器人提供计算及移动功能。硬件部分由一台X86工控机负责计算和控制,包含串口通讯、千兆网络通讯控制器及USB设备接口。移动功能由2个PID闭环控制的轮毂直流电机完成,并配有2个转向轮和1个防后倾辅助轮,电机控制器使用STM32单片机平台开发[1]。软件部分采用开源机器人控制系统ROS[2],运行在工控机的Ubuntu Linux操作系统上,并安装配置遥控消息接收、电机控制指令、建图程序、导航程序等。
1.2 通讯模块
通讯模块使用5G或4G路由器,主要用于接收远程控制信号、传输现场高清视频及语音对讲,并且能够自适应场所各运营商的频段、延迟及速率。路由器的千兆网口与智能底盘上的工控机通过加固型RJ45耦合器连接,与业务模组通过普通网线或无线连接。路由器和物联网继电器通过降压电路直接连接到电池上,用于远程启动机器人。
1.3 监控摄像头模块
机器人针对监控场景的大小远近,选用不同参数的长焦、广角及红外摄像头,信号传输速率支持同时搭载2~3个摄像头。摄像头通过路由器接入网络,连接到物联网服务器,支持多终端同时查看及控制。摄像头内置了云台调节、语音对讲功能,音频线单独连接到智能底盘上的音响上用于外放。摄像头底座安装在由螺杆电机驱动的升降杆上,通过智能底盘远程控制。
1.4 遥控及自主导航模块
机器人分为远程遥控和自主导航两种模式。其中,远程遥控使用PC端控制,通过观察低位安装的超广角摄像头的实时图像感知机器人的环境位置,同时调节机器人的移动方向和速度。自主导航模式采用SLAM技术,包括MPU9250 9轴高精度陀螺仪[3]、激光雷达、超声波探头等。激光雷达在预先设定的区域内绘制地图,然后在地图上标记路径点,机器人在路径点之间移动[4]。如遇到障碍物,机器人会在超声波雷达识别后进行自动避让,随后绕回路线继续前进。
1.5 电池及自动充电模
机器人采用锂电池供电,根据不同的工作负载提供8~16 h的续航时间,智能底盘、路由器和业务相关装备均以并联的形式与锂电池相连。机器人的自动充电功能采用陀螺仪初步定位,结合扫描充电桩上的二维码精确定位的方式,裸露在外壳的正负极触点与充电桩上的触点通过机器人移动挤压连接。充电程序设置为当电量低于20%时发出警报,如无人工干预,电量低于15%时自动回充电桩充电。
1.6 业务相关装备
空港常用的业务相关设备包括超声波雾化消杀器、红外测温仪、护照扫描器、马匹芯片扫描器、可疑行李RFID扫描器等,这些设备均由36 V锂电池逆变或调压后供电,通过智能底盘上的主机或与5G路由器接入网络。其中,消杀器和护照扫描器固定安装于机器人平台,其他手持式设备放置在机器人的置物托盘上,方便关员随时取用。
1.7 监控指挥云平台
多台机器人的遥控和协同工作依赖于监控指挥云平台,该控制程序在Windows环境下开发,集成了机器人搭载摄像头和传感器的API。视频传输协议基于摄像头制造商的物联网服务器。软件模块通过WebSphere集成进监控指挥云平台。
通过组装以上模块,可以制备适用于空港各业务场景的机器人整机。经测试,整机的工作温度在-10~60°C之间,耐振动冲击性能<0.5 G,适用于空港这种地面平整、无粉尘的环境。机器人的部分参数见表1。
2 研究及应用结果
2.1 自主导航机器人在航站楼的应用与问题研究
所研制的机器人在杭州萧山机场T2航站楼大厅及口岸流调区投入使用(图2),为入境旅客检疫和空间消杀提供支持。机器人日常在大厅设定的区域内巡逻,为旅客提供咨询服务,联线监控指挥中心的旅检关员进行视频对讲,并用机载红外测温仪对疑似病患旅客进行测温。如果旅客携带了前置贴标的可疑行李,机器人搭载的RFID扫描器将自动进行数据读取标记,将该旅客的视频追踪画面传送指挥中心。航班间隙及入境旅检结束后,机器人行驶至流调区进行24 h执勤,对无关闯入、逗留人员鸣笛驱散,并进行二次消杀。机器人最大巡逻速度为1 m/s,最大爬坡角度为15°,续航时间为12~16 h。
由于航站楼大厅是室内环境,流调区是半封闭环境,无法用GPS信号进行定位,因此机器人使用激光雷达和摄像头等传感器进行自主导航。大厅里机器人对摄像头图像建立特征点进行方向定位,再用激光雷达测距判断具体位置(图3),此方法的优点是适用空间范围大、对环境光照变化的容错率高,缺点是实时图像计算量会降低机器人的运行效率。在流调区,机器人依靠激光雷达预先建立SLAM地图[5-6],并在地图上标记路径点完成导航(图4),该方法运行效率高,适用于空间范围小的区域,缺点是对环境的光照强度变化较为敏感。
针对两个场景下机器人使用的激光雷达的定位精度进行测试,结果表明在大厅夜间的测距误差小于白天,即夜间导航准确度较高,这可能归因于夜间大厅的光源更加稳定(表2)。而在流调区结果相反,白天的测距误差小于晚上,即白天导航准确度较高,这可能是夜间半户外场景下白炽灯光照不均匀所致(表3)。
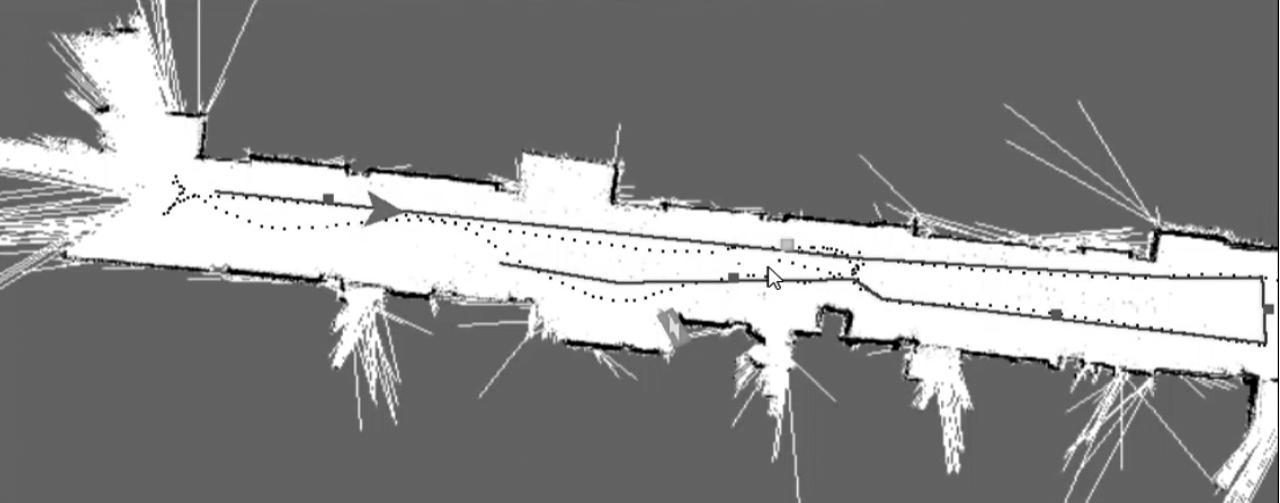
图4 机器人在流调区用激光雷达建立导航地图及设定路径点
Fig.4 Robot uses LiDAR to establish a navigation map and set
path points in the outdoor control area
2.2 远程控制机器人在终末消杀监督中的应用与问题研究
搭载升降监控摄像头及缩小底盘的机器人在某国际航班机舱内进行终末消杀监督作业(图5)。该机器人的底盘经过改造缩小,适应狭窄的机舱过道,同时增加了防倾倒辅助轮,以便在旅客廊桥的坡道运行,再由机组成员搬进机舱进行作业。机器人由监控指挥中心远程遥控,多视角监督机舱内的消杀情况,减少一线关员进入机舱的人次及防护服的穿戴次数。
机器人平时在大厅巡逻或充电,航班降落时行驶至廊桥,最后进入机舱工作,行驶距离长达数百米,沿途网络环境变化较大,信号极不稳定。遥控机器人既要发出实时控制指令,同时要接收摄像头的视频传输,以观察机器人所处的位置,因此网络质量测试对保障机器人平稳运行至关重要。使用路由器自带的信号检测程序,在机器人途径点测试5次网络参数并取平均值[7],确保机器人的网络传输性能在整条移动线路上保持稳定(表4)。对于异常情况,当网络传输速率低于30 Mbps或延迟大于300 ms时,机器人设定自动刹车,以防误碰误撞。
2.3 监控查验云平台在停机坪通关场景的应用
机器人根据停机坪的户外场景进行了改造,并作为智慧空港监控查验云平台的终端设备,用于保障杭州亚运会马术比赛的赛马及马童从停机坪通关(图6)。该机器人配备了户外专用的防雨底座外壳,集成了赛马芯片扫描器、护照扫描器、红外测温仪等业务模块。长焦摄像头用于拍摄机坪远处飞机的卸货情况,广角摄像头用于监督已落地马匹通过闸口后的检疫流程,2个摄像头的图像都实时地传送到监控指挥中心(图6),且指挥中心可以通过机器人与当班关员及时沟通,提升查验效率和质量。
图6 机器人在停机坪进行杭州亚运会马术比赛入境查验及监督作业(a),监控指挥中心使用机器人进行远程指挥(b)
Fig.6 Robots perform entry inspection and supervision for the Asian Games Equestrian Competitions on the apron (a), and the monitoring and command center uses robots for remote command (b)
这种“中心+现场”的新型查验监管模式依赖于针对机器人终端开发的智慧空港查验管理系统,系统架构图如图7所示。该系统集成了查验机器人指挥云平台,以及固定式摄像头、单兵终端、健康申报POS机等多种硬件,对口岸现场进行全域数字化管理[8-9]。通过低延时、有限带宽、支持多设备接入、符合相关数据安全要求的平台网络[10-11],提高查验机器人作业效率与准确性,并将云上信息与现场实际状况比对互通,以满足口岸安全管理和高效通关需求。

图7 智慧空港查验管理系统(机器人模块)架构图
Fig.7 Architecture diagram of smart airport inspection management system (robot module)
3 讨论
海关系统在“机器换人”方面有过诸多尝试,主要针对单一业务类型或某种重复的动作进行定制。本研究将机器人平台化、模块化,通过组装模块、调整部分程序即可适用于空港口岸多种业务现场,是一种主流、快速匹配业务需求的项目开发方式。但这种设计也有其缺点,主要是机器人缺乏外观的整体结构设计,防水防尘、防震动性能相对较弱。另外,“中心+现场”的监控指挥模式所需的终端控制和实时图传功能依赖于外部设备供应商的物联网服务器,因此在大批量推广前需要在海关内网构建物联网服务器,以保障口岸数据安全。
4 结语
近年来,随着人工智能的快速发展,机器人在海关业务中的应用得到长足发展。本研究提出的模块化机器人平台具有广适应性、高可靠性、低成本的特点,最大化地将机器人这种工具应用到空港各类业务现场,将查验、监督、检疫的动作流程转变为自动化设备及云服务器的动作,切实减轻关员工作负担。模块化机器人平台为“中心+现场”创新监管模式在口岸一线的应用提供了探索方向。
参考文献
[1]祝惠一, 张新星, 王正琪. 基于STM32的轮毂电机控制器硬件设计[J]. 河北农机, 2019(10): 33-34+36.
[2] Quigley M. Programming Robots with ROS: A Practical Introduction to the Robot Operating System[M]. O’ Reilly Media, Inc., 2015.
[3]魏权利, 李莹莹, 何爱欣. 九轴陀螺仪在AGV自主导航中的应用设计[J]. 计算机测量与控制, 2019, 27(10): 209-213.
[4] Yue J, Wen W, Han J, et al. LiDAR Data Enrichment Using Deep Learning Based on High-Resolution Image: An Approach to Achieve High-Performance LiDAR SLAM Using Low-cost LiDAR[C]. Computer Vision and Pattern Recognition, 2020.
[5]张大伟, 苏帅. 自主移动机器人视觉SLAM技术研究[J]. 郑州大学学报(理学版), 2021, 53(1): 1-8.
[6]梁双, 倪晓昌, 董娇玲, 等. 基于激光雷达的SLAM算法综述[J]. 信息与电脑(理论版), 2022, 34(3): 59-61.
[7]刘轶康. 国际运营商LTE终端速率测试方法比较[J]. 中国新通信, 2016, 18(2): 106-107.
[8]周风余, 尹磊, 宋锐, 等. 一种机器人云平台服务构建与调度新方法[J]. 机器人, 2017, 39(1): 89-98.
[9]聂冬, 宋阳, 周海波, 等. 基于4G的机器人与云平台无线数据传输系统设计[J]. 天津理工大学学报, 2021, 37(6): 11-15.
[10]童林萍, 严雄兵, 张荻. 云平台安全架构及防护机制研究[J]. 网络安全技术与应用, 2022(8): 66-68.
[11]周文俊. 云数据安全风险检测研究[J]. 网络安全技术与应用, 2021(4): 64-65.
表1 机器人参数
Table 1 Robot parameters
智能底盘 | 计算模块:i5处理器,8G内存,512G硬盘 |
电机控制器:电压12~36 V,最大电流30 A,最大功率1080 W,控制精度1%以内 | |
轮毂电机:6寸/8寸 防水防尘等级IP55 | |
通讯模块 | 5G路由器 传输速率250 Mbps |
4G路由器 传输速率150 Mbps | |
监控摄像头 | 长焦 焦距12~50 mm |
广角 焦距 2.7~12 mm | |
红外 焦距 4~8 mm | |
电池及自动充电模块 | 电池组 电压36 V 容量10~20 Ah |
自动充电桩 输出电压24/36/48 V,电流10 A | |
业务相关装备 | 超声波消杀器:最大出雾量2200 mL/h,消毒液容量15 L |
红外测温仪:测温范围30~42℃测温精度≤±0.3℃ | |
监控指挥软件 | 机器人终端ROS+Ubuntu开源系统,WebSphere云平台 |


图2 搭载消杀器和人员驱散模块的机器人在机场大厅和流调区工作
Fig.2 Robots equipped with sterilizers and personnel dispersal modules work in airport halls and outdoor control areas


图3 机器人在空旷大厅以特征点识别的方式确定方向
Fig.3 Robot determines its direction in the empty hall through feature point recognition
表2 机器人使用激光雷达在大厅室内工作测距精度表
Table 2 Indoor distance measurement accuracy of robot using LiDAR
次数 | 大厅白天 | 大厅夜间 | |||||||
实际值 (cm) | 测量值 (cm) | 误差 (cm) | 平均误差 (cm) | 实际值 (cm) | 测量值 (cm) | 误差 (cm) | 平均误差 (cm) | ||
1 | 497.4 | 488 | 9.4 | 13.28 | 455.6 | 452 | 3.6 | 10.29 | |
2 | 622.9 | 614 | 8.9 | 560.9 | 551 | 9.9 | |||
3 | 1018.3 | 1011 | 7.3 | 1054.7 | 1050 | 4.7 | |||
4 | 1608.0 | 1589 | 19.0 | 1651.7 | 1639 | 12.7 | |||
5 | 2001.5 | 1977 | 24.5 | 2029.1 | 2016 | 13.1 | |||
6 | 730.1 | 724 | 6.1 | 697.7 | 687 | 10.7 | |||
7 | 1383.7 | 1372 | 11.7 | 1581.8 | 1573 | 8.8 | |||
8 | 1852.3 | 1833 | 19.3 | 1954.2 | 1936 | 18.2 | |||
9 | 774.7 | 764 | 10.7 | 885.5 | 879 | 6.5 | |||
10 | 1561.9 | 1546 | 15.9 | 1469.7 | 1455 | 14.7 | |||
表3 机器人使用激光雷达在流调区室外工作测距精度表
Table 3 Outdoor distance measurement accuracy of robot using LiDAR
次数 | 室外白天 | 室外夜间 | |||||||
实际值 (cm) | 测量值 (cm) | 误差 (cm) | 平均误差 (cm) | 实际值 (cm) | 测量值 (cm) | 误差 (cm) | 平均误差 (cm) | ||
1 | 578.7 | 572 | 6.7 | 11.52 | 453.6 | 443 | 10.6 | 16.26 | |
2 | 747.4 | 738 | 9.4 | 878.8 | 872 | 6.8 | |||
3 | 1390.3 | 1386 | 4.3 | 1307.7 | 1294 | 13.7 | |||
4 | 1787.8 | 1769 | 18.8 | 2006.7 | 1977 | 29.7 | |||
5 | 704.3 | 697 | 7.3 | 631.1 | 622 | 9.1 | |||
6 | 1579.1 | 1574 | 5.1 | 1364.7 | 1346 | 18.7 | |||
7 | 1976.4 | 1955 | 21.4 | 1800.4 | 1778 | 22.4 | |||
8 | 535.9 | 527 | 8.9 | 756.2 | 742 | 14.2 | |||
9 | 1182.7 | 1172 | 10.7 | 1238.7 | 1226 | 12.7 | |||
10 | 1680.6 | 1658 | 22.6 | 1901.7 | 1877 | 24.7 | |||
表4 杭州萧山机场不同场景下的网络状况
Table 4 Network conditions of Hangzhou Xiaoshan Airport at different locations
测试地点 | 运营商 | 下载速度 (Mbps) | 上传速度 (Mbps) | 下载延迟 (ms) |
机场大厅 | 移动 | 436.8 | 76.4 | 79.2 |
机场大厅 | 电信 | 484.2 | 89.3 | 103.0 |
廊桥 | 移动 | 356.0 | 106.2 | 78.0 |
廊桥 | 电信 | 392.1 | 98.8 | 91.4 |
机舱 | 移动 | 101.4 | 52.8 | 174.8 |
机舱 | 电信 | 136.7 | 76.1 | 125.0 |
