
CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

进口矿产品冻层采样机器人技术研究
作者:方霆 韩红兵 张义 王钊 张淇淞 曹骁 彭伟伟 刘博
方霆 韩红兵 张义 王钊 张淇淞 曹骁 彭伟伟 刘博
基金项目:海关总署科研项目(2021HK220)
第一作者:方霆(1968—),男,汉族,北京人,大专,主要从事机电设备设计制造,E-mail: 13661188302@139.com
通信作者:韩红兵(1970—),男,汉族,山西繁峙人,本科,高级工程师,主要从事国门安全信息技术与海关科技管理,E-mail: 809249692@qq.com
1. 北京华力兴科技发展有限责任公司 北京 101300
2. 满洲里海关 满洲里 021400
1. Beijing Hualixing Technology Development Co., Ltd., Beijing 101300
2. Manzhouli customs, Manzhouli 021400
Abstract In this study, a novel retractable mechanical arm design is employed for the robotic sampling of frozen layers. Utilizing newly developed high-alloy materials, the robot incorporates technologies such as point cloud clustering algorithms, LiDAR detection, machine vision, computer information, and artificial intelligence. This system is designed to withstand harsh winter conditions, including severe cold and strong winds. It possesses the capability to break through a certain thickness of frozen material and achieve the mechanical, automated, and intelligent sampling of various granularities of coal and other mineral products loaded on incoming freight trains. Experimental data indicates that this technology is suitable for precise and quantitative sampling, frozen layer sampling, and sampling of large coal blocks and other mineral products. It provides robust support for the supervision and inspection of bulk materials. This research addresses the challenges of sampling imported mineral products at the Manzhouli railway port, improving sampling efficiency, reducing manual labor safety risks, compressing overall port clearance time, facilitating enterprise clearance, optimizing port business environments, and providing decision-making references for port supervision and the application of new equipment, to further advance the development of smart customs.
Keywords sampling; robot; mineral products; bulk materials; customs control; commodity inspection
采样是海关对进口商品监管查验的重要环节,确保进口商品质量和安全性。目前,在满洲里铁路口岸,海关工作人员对进口煤炭等矿产品进行采样时,需要采样人员登临货运列车车厢顶部,人工挖掘0.4~0.6 m深度,把每个采样点0.5~1.5 kg矿产品采出并转移至车下送检[1]。该人工采样方式存在劳动强度大、效率较低等问题,采样过程存在诸多人为因素,对进口煤炭等矿产品监管查验、商品检验的规范性和准确性带来影响。
因此,亟须研究一种普遍适用的冻层采样机器人技术装备,特别是适用于北方铁路口岸冬季严寒大风恶劣环境下,具备破开一定厚度的冻结体能力的冻层采样、大块煤炭等矿产品采样和定点定深定量采样的技术装备,实现全程机械化、自动化、信息化和智能化的先进采样技术,对解决满洲里铁路口岸进口矿产品采样中的难点、痛点,降低人工作业安全风险,提高采样效率,便利企业通关和优化口岸营商环境,为口岸监管技术和新装备应用提供决策参考具有重要意义。
1 国内外采样技术研究现状
经对国内外相关领域调研,目前多家公司研制的煤炭等大宗物料采样设备普遍采用螺旋式,个别采用简易机械手式采样机械结构技术。螺旋式和简易机械手式取样设备虽然设计符合GB/T 19494.1—2004要求,但是由于受到技术原理和机械结构等限制,该类设备存在一定缺陷。主要是不能对大于采样管直径一半的物料采样,对物料粒度大小要求较高;不能定点深度采样,只能断层取样,它是取料路径上的物料混合物,物料代表率较低;机械结构上不具备强破碎能力,无法用于冻层和大块物料的采样等问题。
满洲里铁路口岸冬季寒冷漫长,进口煤炭等矿产品存在冰冻及大块形态,断面十分坚硬,现有传统的螺旋式和简易机械手式取样器难以应用,不适用北方铁路口岸严寒环境下海关对煤炭等矿产品的监管查验和商品检验,而需要探索研究更加有效的采样装备技术。
2 冻层采样机器人技术研究
我们制定技术指标、评测方法,设计标准化采样程序,以测试冻层采样机器人性能及在满洲里铁路口岸的适用性。
2.1 技术指标、评测方法[2-4]
订立如下量化评测方法:
1)结构效率(Structure efficiency)。采样机构一次操作能够取到物料的部分与采样机构内在结构体的比例,其数值差异是由取样器结构原因造成的。其计算公式如下:
结构效率 = (Vs-Vq) / Vs×100% (1)
式(1)中,Vs:伸入物料中的采样机构总体积;Vq:由于结构原因伸入物料中的采样机构不能取到的体积。
量化评测指标:结构效率>75%。
2)空间效率(Space efficiency)。系统对取样单元的测量覆盖范围、对物料识别范围、取样机构可操作空间范围三者交集与总物料空间的比率。其计算公式如下:
空间效率 = (Vm∩Vr∩Vc) / Vz×100% (2)
式(2)中,Vm:系统对取样单元的测量覆盖范围;Vr:系统对物料识别范围;Vc:取样机构可操作空间范围;Vz:物料总体积。
量化评测指标:空间效率>95% ,对埋藏深度>3 m的物品进行抓取。
3)物料代表率(Material representative rate)。物品取样具备代表性的比率。取样子样对整体取样单元的代表性,是衡量取样器是否能在取样单元中均匀采取子样,其值为空间效率与结构效率的交集。物料代表率的值标示采样方案的工作成效及对取样单元设计优劣的评估。其物料代表率值越大,取样子样越具有代表性。计算公式如下:
物料代表率 = 结构效率∩空间效率×100% = [(Vs-Vq) / Vs]∩[(Vm∩Vr∩Vc) / Vz]×100% (3)
量化评测指标:物料代表率>90% 。
4)系统性偏倚率(Systematic bias)。由于系统结构设计的缺陷,导致取不到的物料与总物料形成一定的比例,系统性偏倚率与物料代表率的和值为100%。
量化评测指标:系统性偏倚率<10%。
5)偏倚(Bias)。系统误差,它导致一系列结果的平均值总是高于或低于实际值。由于国家标准中没有量化指标,故参照系统偏倚率。
6)精密度(Precision)。对同一个货源进行一系列测定所得结果间的彼此符合程度就是精密度。
精密度估算公式如下:
 (4)
(4)
式(4)中,PL:批物料在95%的置信概率下的取样、制样和化验总精密度;V1:初级子样方差;n:每一个取样单元的子样数目;u:批中实际取样的取样单元数目;m:批被划分成的取样单元数目;Vm:取样单元方差;VPT:制样和化验方差。
在连续取样下,u = m,公式(4)变为
 (5)
(5)
当一批物品作为一个取样单元取样时,m = 1,公式(5)变为
 (6)
(6)
量化评测指标:PL趋于100%。
2.2 采样程序的设计
1)采样对象和试样类型的确定。采样方案设计的第一步是确定预采样的物品,包括来源、品种、被采样的批量、标称最大粒度和品质的历史状况。根据采样的目的决定技术评定、过程控制、质量控制或商业目的试样类型。根据采样目的和试样类型,决定测定的品质参数:粒度组成或其他物理化学特性参数。
2)采样方式的确定。采样方式:连续采样或间断取样的确定。连续采样是对一批物料的所有采样单元都取样,连续抓取,每个采样单元的取样间隔(时间或质量)都相同。间断采样是只从一批物料中选定几个采样单元取样,其他单元不采样。
3)据实评测。用智能测量识别精准定点随机点方法抓取物料,确保采样单元中,每一部分均具有相等的概率被采用。在95%的置信概率下对物料进行取样化验,根据采样方案、采样程序、采样方式的描述与实际测量环境最终选择确定评测方法,各项检测数值量化评测指标均达标。
2.3 冻层采样机器人模型设计
2.3.1 冻层采样机器人组成
根据铁路口岸的客观条件我们设计研究冻层采样机器人,主要由机械手、直角坐标机器人、独立自主的智能化系统组成。
1)机械手
①伸缩机械手设计。机械手作为核心部件,采用伸缩爪式机械手结构。机械手设计存在力学及结构、材料和驱动模式等方面内容,使得机械手在取样品过程中,可以应对各种恶劣环境。机械手采用特殊设计和复杂工艺确保受力过程中不被破坏,又要确保采样过程中不会造成水分损失,不会对不同粒径、不同比重的物料进行选择进而保障无品质变化。
伸缩爪式机械手(图1)仿生鹰爪设计,是合围抓取方式的机械结构。机械手构造由手爪、手筋、支撑壳体、传动骨骼、料仓、推盘、指甲、滑道或滑槽、滑道限位机构等组成,其中支撑壳体是整个装置的结构支撑体,与手爪通过滑道限位机构关联,支撑壳体内嵌传动骨骼和推盘,支撑壳体与传动骨骼内部、推盘侧部与闭合的手爪内侧共同合围部分是料仓,手筋与传动骨骼和手爪通过轴或关节连接;传动骨骼在支撑壳体内部,通过外力传动骨骼与支撑壳体可以相对运动,运动的传动骨骼通过手筋携带手爪在支撑壳体上滑行运动,进而使手爪打开或合上,由于手爪与支撑壳体存在运动缝隙,指甲用以隐匿缝隙。我们通过圆筒复合球缺作为基体设计出了伸缩爪式机械手,依托于球缺这种结构既提升了机械手的整体强度,又为机械手手指提供了行走合围路径曲线,同时解决了机械手对物料的有效投影面积,这大大提高了机械手的结构效率,为提升物料代表率打下坚实的基础。推盘通过其上连接杆的外部作用可以在传动骨骼内部上下运动进而实现将料仓内的黏性或卡壳物料推出料仓。通过这样的设计实现机械手在深度埋藏的复杂环境下,对煤炭、矿石、矿粉等具体的物料进行精确抓取。
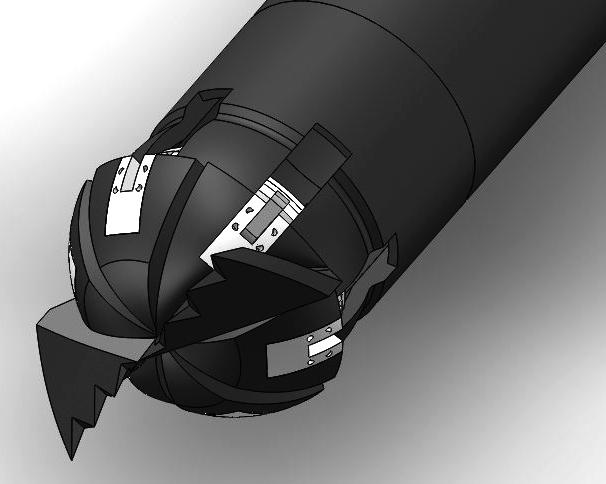
图1 机械手设计图
Fig.1 Mechanical design diagram
伸缩爪式机械手具备高结构效率、高掘进深度、冻层采样、大块无偏倚采样先进的理念和原理机制。超高代表率,避免了包括空间盲区系统性偏倚、比重和粒径选择系统性偏倚、外水分挥发系统性偏倚,采样参数客观公正。
②机械手研制。与机械手相关系统有机械手本体、液压驱动系统、多模减速机系统。机械手本体是设备核心器件,其力学及结构设计要求既要尽可能少占用净空间又要具备极强的抗挤压抗冲击力,要把这些极端的矛盾统一起来。
材料的屈服强度、弹性模量、硬度、耐磨性等参数对机械手的实际应用有重要影响,所以在设计机械手的同时,我们需要对合金材料进行充分研究,进而设计出适用的高合金材料。量化评测指标可以从机械手的结构效率、物料代表率、新材料的强度、取样数量等方面加以阐述。结构效率可以通过对机械手的结构计算得出,结构效率≥80%即为合格。物料代表率可通过实测机械手下探深度数据,再利用结构效率套用公式计算得出,物料代表率≥90%。材料的强度由检测机构测试得出,机械手综合屈服强度≥1000 MPa、弹性模量≥200 GPa、抗拉强度≥1 GPa、硬度HRC≥70。
液压驱动系统负责机械手的张开闭合驱动,由于机械手工作环境恶劣,要求其驱动压强大于2.5 MPa,液压驱动件采用伺服器件。
机械手驱动对空间要求极其苛刻,需要将多种驱动输入多种驱动模式集成于一体,为此我们提出多种驱动模式及多个驱动输入的减速机装置,即多模多驱减速机装置。为了保障设备的可用性,本装置还集成了保护装置、封防尘吹扫设计,温度管理系统,密闭介质循环系统和润滑物质缓释吸附系统。指标可以从机械手驱动需求指标进行定义:机械手行程为3.6 m,机械手行程推力≥10 t,机械手闭合力量≥8 t,机械手本体旋转扭力≥600 Nm,机械手本体旋转速度≥360 r/min,机械手内部激振频率≥960 Hz,激振力≥960 kg。
2)直角坐标机器人。作为机械手的承载和运行平台,直角坐标机器人在特定的三维空间中进行全方位操作。采用双梁防脱结构设计,保证机械手在复杂受力环境下,均能安全可靠运行。我们设计了重载耐低温防脱复合轨系统技术(图2),由复合梁、交接架、多面轨、环抱轮组等组成。复合轨系统通过复合梁、交接架、多面轨轴向刚性分别连接实现延伸,可以分布式布放,便于大规模快速推广应用,便于维修维护,单位体积具备更高的载荷,并承载各方向受力,安全性大大提高。
运行承载平台大致分为车载式、地轨龙门架式、天车式装备,我们设计的直角坐标机器人集成于车载式、地轨龙门架式、天车式装备上(图3)。由于运行承载平台是业界较为成熟的结构方案,本文不作详细说明。
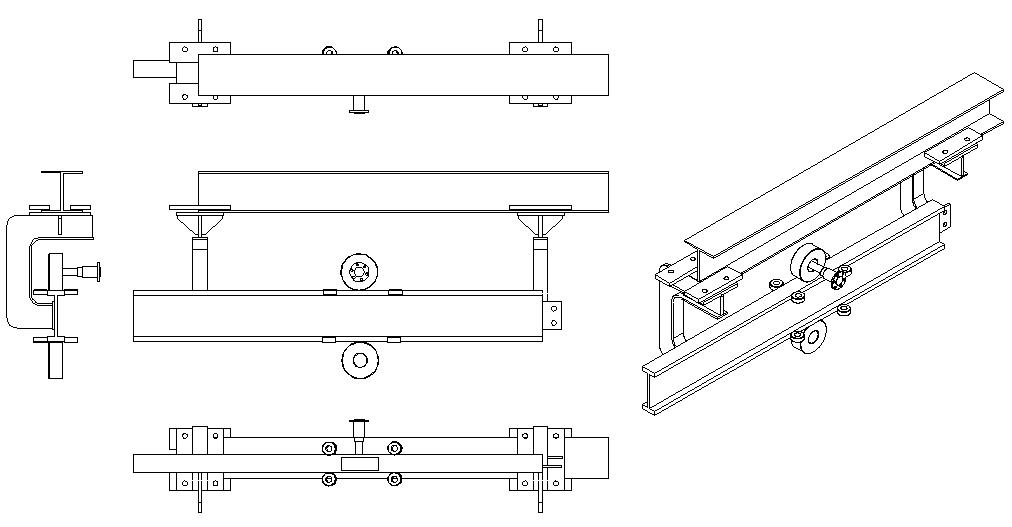
图2 复合轨设计图
Fig.2 Composite rail design drawing
3)独立自主的智能化系统。独立自主的智能化系统是基于三维环境情况探测、感知、识别来控制并反馈执行结果。机器人依照业务逻辑独立自主工作,通过三维扫描、智能识别和随机精准定位、智能控制和驱动来感知和反馈。
为了实现客观的人工智能测量识别和最大的物料代表率,提升空间效率,需要全新的传感器测量识别系统,目前能够满足应用方案、适应应用现场恶劣条件的只有激光雷达三维测量[5]和人工智能识别技术。
激光雷达扫描物体轮廓在软件系统中生成点的数据集合即点云,点云中的每个点均有相对独立的三维坐标值,对点云的分析处理实现对物体的还原、定位以及识别[6-8]。对物体轮廓中的点进行随机选取,选取方式有栅格化选取,即对选定的具备某个特征类的轮廓进行栅格化,例如对货物栅格化为某个特定尺寸的小方块,对每个栅格化的独立栅格区域标注相关的识别号,通过随机算法取栅格识别号以达到生成随机点。
在激光雷达找到车辆和货物的时候通过模式识别系统识别出货物的位置和形态,这样空间效率实际上就是识别出的货物位置和形态。由于激光雷达的测量精度为0.1~0.2 mm,误差可以忽略不计,故其系统空间效率可达到100%。激光雷达对物体的扫描多以点的方式进行存储,然而人们目前仅仅对点的实际位置进行简单的测量应用,由于对点集合的分析所涉及的技术专业领域较多,业界对点集合即点云进行后期处理及智能化的分析应用是个空白领域。
基于车体三维数据进行识别属于车辆和货物点云数据的处理问题。点云数据的处理就是将数据分割成若干个互不相交的子集,每一个子集中的数据同属于一个具有单一特征的曲面。目前点云分割方法主要有基于边的方法、基于面的方法、基于聚类的方法。上述3种方法存在的问题虽复杂,但结合人工智能识别技术可以很好地推广应用。
计算机通过激光雷达获得点云数据判断三维车型货物数据(图4),通过对点云的模式识别实现对车辆货物识别,为机器人装上眼睛和智能大脑。多次扫描同一辆车实际应用效果检测,结果为同一辆车,识别符合率≥99%。
在系统工作的时候,机器人将自动进入保护模式,人体识别和机器人碰撞保护传感超宽雷达系统、3D识别系统、发动机工作状态识别系统等开始工作,进而对区域内的人和车辆进行保护。平台数据分布式管理,数据在线加密管理,安全可靠。
3 冻层采样机器人与传统取样器关键结构分析对比
根据国家采样标准和国内厂家实际应用状况,采样运输车辆中的物料可能是颗粒物,也可能是粉末物或大块物料,将采样机器人机械手探入物料会产生巨大的反作用力,反作用力的大小和机械手的外形结构相关。除了反作用力,机械手还将面对大块物料点接触所构成的局部极限压强。另外,机械手设计上还需要在不改变物料组分的前提下考虑大块物料取芯,且这种设计在极冷、潮湿的状态下,不对使用效果产生影响。
根据如上应用要求,本项目通过伸缩式机械手的开发和电子技术研发,最终实现结构效率>80%、物料代表率>95%和完全随机定点取样的通用型刚性机械手解决方案[9-11]。3种取样器结构示意图(图5)。
冻层采样机器人采用伸缩爪式机械手结构,该结构可以与螺旋取样器、简易机械手在GB/T 19494.1—2004标准下进行比较。为了更加科学化、明细化、量化的比较,我们引入“物料代表率”等一系列定义公式。性能对比结果见表1。
结构效率的实测数据对比:冻层采样机器人为80%,螺旋式取样器为60.3%,简单机械手取样器为65.5%。
空间效率是可测量、可识别的交集与总物料空间的比率。在取样过程中,由于被取样车辆和物品的形态均不同,目前传统厂商除了提供人工控制设备,自动化设备是靠人工输入车辆尺寸然后通过单边扫描实现定位的,这样的技术方案为 “估计类方案”,非“实测类方案”,无法采用计算机“人工智能识别方案”,既不安全,又容易产生人为干扰因素,无空间效率计算模型。空间效率对比见表2。
物料代表率是综合环境中物品取样具备代表性的比率。物料代表率对比见表3。
从数据上看,伸缩爪式机械手采用这样的设计缺点是牺牲部分结构效率,结构效率80%,然而实际应用中却非常理想。首先设计外排料结构,该机械手向下探入深度>3 m;其次,机械手采用伸缩爪方式,其开口底部为圆形,这决定了其垂直抓取能达到全部探测深度范围,这样物料代表率根据被采样深度范围变化能达到80%~99%,充分满足实际应用需求。
因冻层随机采样机器人在设计上解决了一系列技术问题,物料代表率最高超过95%,适用于深层、冻层、大块料、硬质料采样,成功解决系统性偏倚问题,故相对螺旋式和简易机械手式方案更具有优势。
4 结论
通过比较各技术方案和现场测试实验,冻层采样机器人可抓取不同硬度、不同颗粒大小、不同重量、不同深度的矿产品样品,可应对冰冻和冰凌环境,无系统性偏倚,采样精密度符合预期要求。其适用于口岸海关监管作业场所对煤炭等矿产品的采样工作,提高海关管控能力,提升现场采样效率,减少工作人员作业风险,减轻工作人员劳动强度。该技术研究可为口岸监管技术和新装备应用提供决策参考,为推进智慧海关建设发挥积极作用。
参考文献
[1] GB 475—2008 商品煤样人工采取方法[S]. 北京: 中国标准出版社, 2008.
[2] GB/T 19494.1—2004 煤炭机械化采样 第1部分: 采样方法[S]. 北京: 中国标准出版社, 2004.
[3] GB/T 19494.3—2004 煤炭机械化采样 第3部分: 精密度测定和偏倚实验[S]. 北京: 中国标准出版社, 2004.
[4] GB/T 30730—2014 煤炭机械化采样系统技术条件[S]. 北京: 中国标准出版社, 2014.
[5]谢小芳, 万勇, 严可馨, 等. 地下洞库三维激光扫点云区域分割和容积计算[N]. 电子测量与仪器学报, 2019-09-15.
[6]雷敏, 仲思东, 屠礼芬. 一种三维点云聚类算法的研究[J]. 科学技术与工程, 2014, 14(29): 50-53.
[7]欧新良, 匡小兰, 倪问尹. 三维散乱点云分割技术综述[N]. 湖南工业大学学报, 2010-09-15(05).
[8]肖文军, 周天瑞, 张永. 反求工程技术在快速成型中的应用[J]. 科技广场, 2006(2): 95-97.
[9]武汉钢铁(集团)公司. 螺旋式采样头[P].中国: CN202735119U, 2013-02-13.
[10]刘国斌. 煤矿商品煤自动采样机选型的探索研究[J]. 煤质技术, 2018(5): 51-53.
[11]闫思宽. 煤炭采样设备的选型分析[J]. 机械管理开发, 2019(1): 55-56.

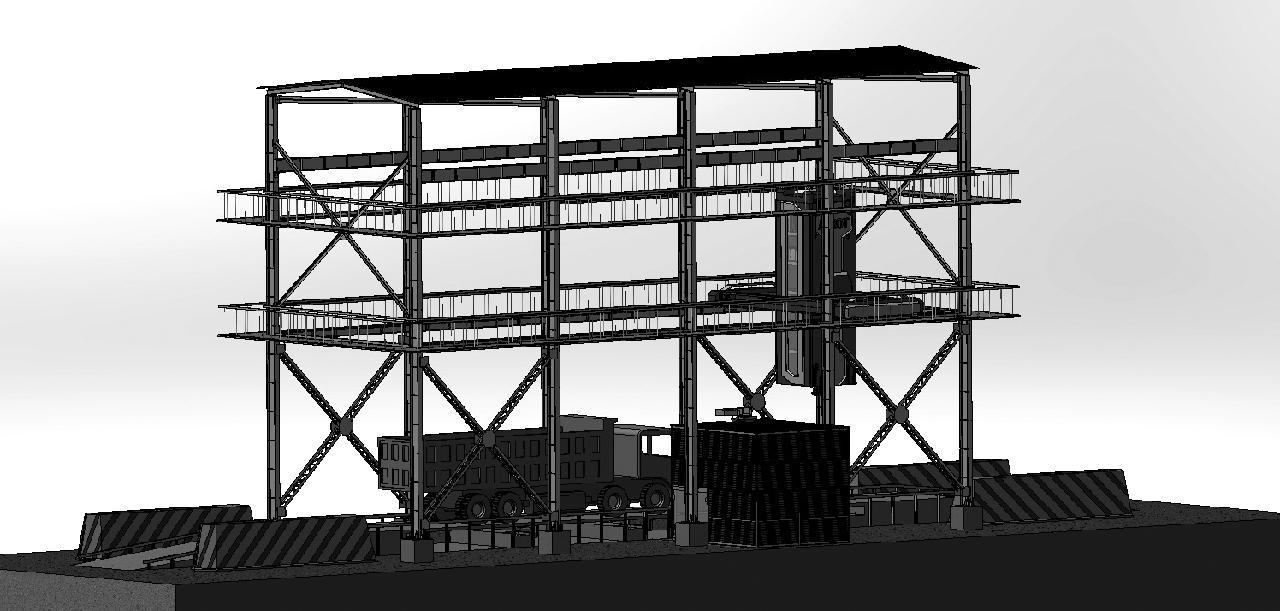
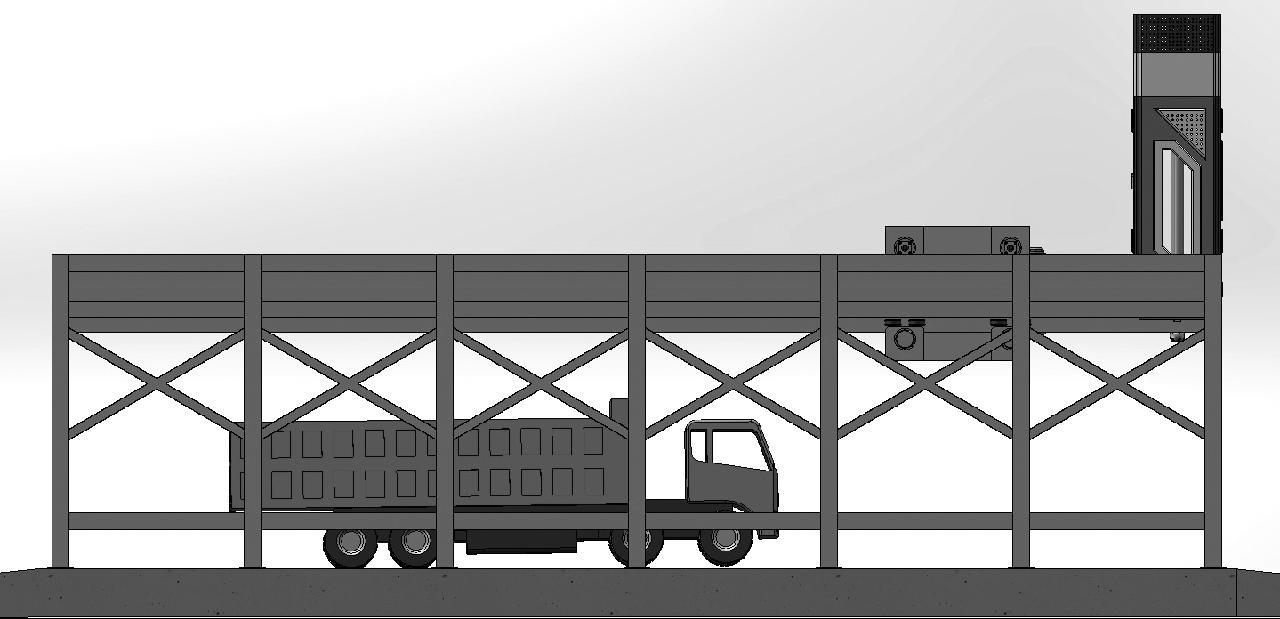
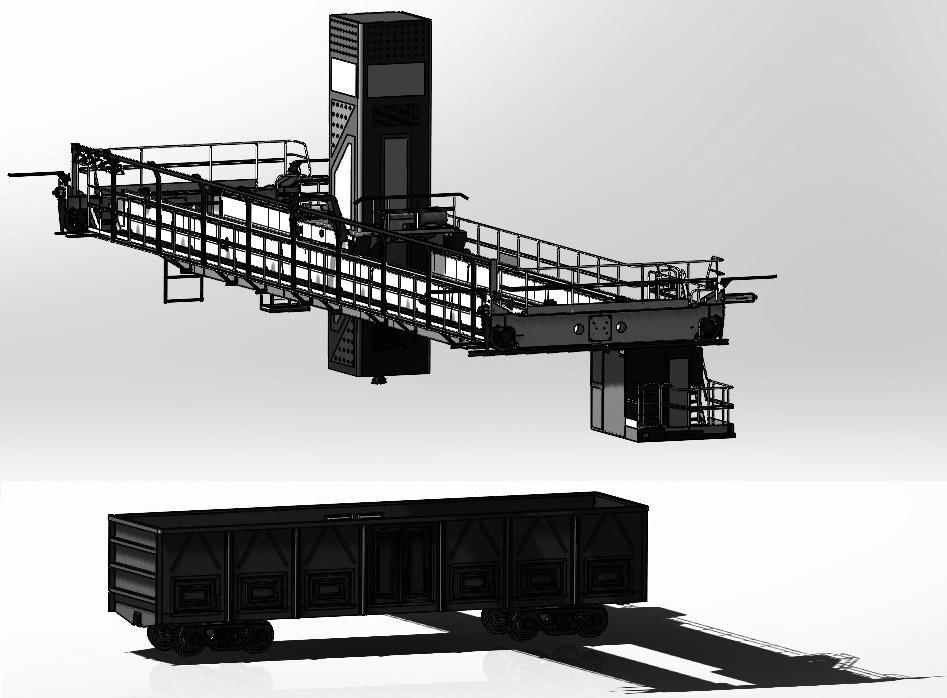
图3 运行承载平台设计图
Fig.3 Design drawing of the running bearing platform
图4 扫描效果图
Fig.4 Scanning rendering

冻层采样机器人 螺旋式 简易机械手式
图5 3种取样器结构对比示意图
Fig.5 Comparison diagram of the three sampler structures
表1 冻层采样机器人与其他取样器性能对比
Table 1 Performance comparison between the frozen layer sampling robots and other samplers
序号 | 冻层采样机器人 | 螺旋式 | 简易机械手式 |
1 | 易集成复杂传感器, 车、货物100%检测识别 | 不易集成复杂传感器, 无法全方位检测识别车辆货物 | 不易集成复杂传感器, 无法全方位检测识别车辆货物 |
2 | 全域完全随机抓取, 没有盲区, 不会空抓, 可大块取芯 | 只能断面采样, 存一定结构盲区和空采区, 不可大块取芯 | 只能表面采样, 存较大结构盲区和空采区, 不可大块取芯 |
3 | 综合环境超3 m取样深度 | 超3 m取样深度 | <1 m取样深度 |
4 | 物料粒径<2 m | 物料粒径<70 mm | 物料粒径<150 mm |
5 | 点采、段采、断面采 | 断面采 | 点采 |
6 | 适用冻层采样 | 不适用冻层采样 | 不适用冻层采样 |
7 | 车人智能保护 | 车人无保护 | 车人部分保护 |
8 | 高速(全域1基点1 min) | 慢速(局域1次2.1 min) | 高速(全域1基点<1 min) |
9 | 无系统性偏倚 | 硬度大块、球型、冰凌、外水分系统性偏倚 | 高系统性偏倚 |
注: 数据来源于东方希望包头稀土铝业自备电厂实测数据
表2 空间效率对比
Table 2 Comparison of spatial efficiency
序号 | 车辆种类 | 取样器类型 | ||
冻层采样机器人 (%) | 螺旋式 | 简易机械手式 | ||
1 | 挂车 | 100 | 无 | 无 |
2 | 自卸车 | 100 | 无 | 无 |
3 | 半挂车 | 100 | 无 | 无 |
注: 数据来源于东方希望包头稀土铝业自备电厂实测数据
表3 物料代表率对比
Table 3 Comparison of material representation rates
序号 | 车辆种类 | 取样器类型 | ||
冻层采样机器人 (%) | 螺旋式 (%) | 简易机械手式 (%) | ||
1 | 挂车 | 94.0 | 69.0 | 46.1 |
2 | 自卸车 | 94.3 | 84.0 | 19.3 |
3 | 半挂车 | 94.6 | 73.0 | 49.3 |
4 | 火车货箱C80 | 95.5 | 50.2 | 21.2 |
注: 数据来源于东方希望包头稀土铝业自备电厂实测数据
