CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

一种新型水尺计重无人船平台系统的设计及应用探索
作者:张忠义 马赛男 丁海涛 曾欢 周聪
张忠义 马赛男 丁海涛 曾欢 周聪
摘 要 本文通过分析比较几种近年来广泛应用的智能装备搭载的智能识别技术,研发了一种新型无人船水尺观测平台,具有自主航行、遥控功能、深度学习和图像模糊识别的水尺智能识别装置,实现了全天候、智能化水尺计重,促进了水尺计重工作的发展,提升了水尺计重工作的准确性。
关键词 水尺计重;水下潜航;无人船;智能识别
Design and Application of a New Draft Survey Platform System for Unmanned Ships
ZHANG Zhong-Yi 1 MA Sai-Nan 2 DING Hai-Tao 3 ZENG Huan 1 ZHOU Cong 1*
Abstract This paper compares currently used identification technologies with intelligent equipment, and develops a new draft survey platform for unmanned ships. The platform has autonomous navigation, remote control function, deep learning and image fuzzy recognition intelligent identification device. It realizes all-weather intelligent draft survey and upgrades the development of draft survey by improving its accuracy.
Keywords draft survey; underwater diving; unmanned ship; intelligent recognition
随着我国经济体量的不断壮大,我国成为大宗商品的主要进口国[1]。大宗商品主要通过水路运输,多采用水尺计重方式确定最终货物重量,其鉴定结果直接影响商品交接结算、保险索赔、运费计算和通关计税等[2]。水尺计重中影响计量准确性的最关键因素是船舶六面吃水数值的读取[3],人工目测仍是目前水尺计重工作中被用以读取船舶吃水数值的最常用方法,但是人工目测的船舶吃水数值容易受到风浪及测量人员的个人主观经验等因素的干扰。传统的观测吃水方法是借助交通艇或小船观测水尺数值,该方法耗时长、成本高、准确性较低,且不易保证测量人员的人身安全。因此,消除或减少干扰因素以及准确、安全、客观读取水尺数值成为水尺计重人员亟待解决的问题[4]。
1 水尺计重简要介绍
1.1 水尺计重流程
常规的水尺作业流程为船舶抵达锚地或泊位后,鉴定人员一般与船方代表人员一起乘交通艇绕待检船只一周,观察并记录六面水尺;再登船查看测量并记录燃油液位、压载水液位、淡水液位,查看有无影响吃水线的异常物体;然后在船舶水尺计量管理软件中输入六面水尺、燃油、压载水、淡水液位数据,并向船方索取船舶资料,核对后得出水尺计重结果[5]。
1.2 传统水尺读数方法存在的问题
人工目测仍是当前水尺计重行业使用最广泛的传统水尺读数方法[6],存在4个问题:1)作业危险程度较高,鉴定人员要乘坐交通艇到达船舶外侧作业,由于海面风高浪急,海况不确定等较多因素,危险性较高;2)人工计重工作量较大,鉴定人员需按照顺序完成船舶外侧、内侧各前、中、后三个水尺的观测记录,作业环节多、作业时间长;3)人工读数误差较大,水尺计重读数时,海浪、观测角度、刻度清晰度等因素都会影响读数,要求鉴定人员具备丰富的排除干扰的经验,否则容易产生较大误差;4)计重过程可追溯性差,人工读数现场不可还原、无法追溯,容易与船方产生纠纷。
2 水尺计重智能识别技术现状
近年我国新型智能化水尺识别技术在研究和应用方面取得了很大进步,为水尺计重模式方法优化提供了借鉴参考[7]。
2.1 六面水尺遥感观测装置
六面水尺遥感观测装置[8]通过在小型遥控船上配置动态平衡捕捉相机,利用无线终端实现船舶操控和遥控摄像,最终实现实时观测水尺和视频记录保存。该观测装置可以节省交通艇费用,降低了鉴定人员的观测风险,但是该装置的承载工具为遥控小船,大风浪天气易受到波浪的扰动,影响视频质量和数据准确性,严重时还可能发生侧翻等问题。另外,小船遥控信号的稳定性也是一个需要解决的问题。
2.2 雷达水尺观测装置
沈益骏等[9]利用在石化行业广泛应用于石油及其制品上的雷达液位测距技术,研发了一套根据靠港船舶实际应用环境,由雷达传感器、固定支架、显示器等共同组成的雷达水尺观测装置,设计优化数据计算公式,并在设计的验证试验中进行试用。但该装置极易受到电磁干扰的影响而不能正常工作,工作条件相对苛刻,且整个测量过程仍需借助船舶相关资料进行计算,增加了水尺观测工作时间。
2.3 无人机辅助观测
杨卫星等[10]借助无人机辅助水尺观测,利用无人机空中摄像技术,通过无线高清图像数据传输获得水尺视频,并对图像视频进行实时分析处理,现场得出水尺读数数据,实现全程视频记录鉴定过程,有效还原工作场景。但这种装置只能看外舷三面水尺,受天气等自然条件的影响较大,抗风性较差,在夜晚、雨雪等情况下无法使用,无人机功率较小,受船舶设备、码头设备干扰,信号屏蔽情况严重,机器失控风险较大,而且一旦出现失控坠海事故,难以打捞,损失严重。
3 新型无人船水尺观测平台
上述水尺智能识别技术都存在一定局限性,本文提出采用小型无人水下潜航船,依托先进的视频探测技术,基于图像处理的水尺识别法,研发新型无人船水尺观测平台系统,快速锁定水尺刻度区域并读数,还可按需定制航行动力、续航时间、抗风抗浪等级,拥有“障碍感知”“智能跟随”“指点航行”等创新功能。
3.1 无人船平台组成
无人船平台主要由平台系统和航控系统组成。
3.1.1 平台系统
考虑实际作业区域船舶的耐波性、任务搭载图像识别系统对船舶的姿态要求、任务搭载载荷重量及便于携带等因素,本研究采用一款小型水下潜航无人船作为平台系统,航行时可在水下潜航。水下潜航无人船具备以下优点:1)无人船配置全彩高清摄像机等装备,具备良好的夜视效果,能够实现“白+黑”24小时全天候作业,完全适合在夜间、雨雪情况下使用;2)水下潜航抗波浪能力较强;3)因无人船内部空间充裕,可携带较大功率设备,配置潜望镜等水上设备可同步搭载信号天线,实现Wi-Fi、4G/5G通信信号实时收发,信号抗干扰能力较强;4)无人船设备稳定性较好,发生损坏的事故概率较低。主要性能见表1。
表1 平台系统具体参数
Table 1 Specific parameters of the platform system
指标名称 | 指标值 |
工作水深 (m) | 0~100 |
重量 (kg) | ≤16 |
长度 (cm) | ≤120 |
直径 (mm) | 124 |
航速 (节) | 3~10 |
航程 (km) | >20 |
工作时间 | 由速度和载荷决定, >4小时 (航速3节情况下) |
导航方式 | 基于GPS/北斗+电子罗盘+陀螺仪的航位推算 |
通信距离 | 4G/5G: 基站范围内; Wi-Fi: 大功率可达500 m |
通信类型 | Wi-Fi、4G/5G (无线/卫星, 可选配) |
电池 | 可充电锂电池 |
3.1.2 航控系统
航控系统包含控制软件、通信系统和岸基控制平台。
控制软件可在平板电脑、手机等终端上安装,软件操作界面友好,操控简单、方便。通过平板电脑、手机可进行自主路径设计航行,并能够观测航行状态。
通信系统根据无人船的工作环境特点,采用4G/5G网络方式,为无人船平台和地面指挥控制站之间的信息交流提供可靠的数据链保障。在4G/5G公网覆盖区域,或者是行业用户基于4G/5G制式搭建的专网覆盖区域,利用已建成的移动蜂窝网络基础设施,实现近、中距离无线通信,是一种经济又实用的通信手段,可以大幅降低通信成本。
岸基控制平台用来远程控制无人船平台,下达各种指令,并接受无人船平台反馈的各项信息。根据需求岸基控制站可升级为“便携式地面站+遥控器”的组合方式。便携式地面站主要包括平板电脑、通信模块,平板电脑内置无人船平台控制软件,实现对无人船平台的全部操作功能。同时,实时显示无人船平台的各项参数。
3.2 吃水智能识别系统
无人船平台通过潜望镜和全彩高清摄像装备观测记录吃水情况,鉴定人员可以在移动端实时读取吃水情况,但是人工读数极易受涌浪、观测角度及个人经验等因素的影响,无人船平台利用深度学习和图像模糊识别等智能化技术自动读取水尺数据,可以避免人工读数视差、经验不足等造成的读数失误,提升水尺数据精准度。
3.2.1 船舶吃水深度学习识别系统
在实际工作中,通常通过观测船舶的水尺标志获取船舶的实际吃水。无人船平台利用深度学习和计算机视觉技术自动测量船舶水尺刻度,从而提高了效率和准确度。首先,船舶吃水深度识别系统利用通过海量船舶吃水线图像数据训练得到的自然场景文本检测(Connectionist Text Proposal Network,CTPN)模型检测被测船体侧面每一行吃水线数字和字母所在区域。其次,船舶吃水深度识别系统利用门控循环单元(Gate Recurrent Unit,GRU)技术和连接时序分类(Connectionist Temporal Classification,CTC)技术对于每一个文本存在区域实现不分隔识别不定长文字,这样即可获得一连串文本信息,如“2”“13M”等。最后,船舶吃水深度识别系统利用船舶吃水线自上而下排列的规律,在一连串文本信息中分别获得最下方的船舶吃水深度米数位和分米数位,如图1中“11M”和“4”,这样将米数位和分米数位组合即可得到船舶的吃水深度,具体识别流程如图2所示。

图1 基于深度学习的船舶吃水深度识别
Fig.1 Deep learning-based ship draft recognition
图2 基于深度学习的船舶吃水深度识别流程
Fig.2 Deep learning-based ship draft recognition process
3.2.2 船舶自稳平台
无人船受涌浪影响产生的晃动会影响吃水水尺的数据采集,因此平台的稳定是确保无人船平台图像采集清晰精准的基础。该平台采用电磁吸附装置,当无人船平台航行至被测船只,释放在平台前方安装的电磁吸附装置上 ,让无人船平台与被测船只固定连接,保持相对稳定,实现摄像头在无人船摇晃环境下保持平面地理坐标下稳定指向、回传视频画面的相对稳定,以此排除船舶晃动对吃水线识别的外部干扰。
3.2.3 吃水线图像模糊识别算法
模糊数字图像处理主要是对模糊吃水线图像进行数字处理,其中数字图像恢复是该部分算法的主要工作。在对图像进行识别前,对数字图像进行灰度化、运动模糊处理、频率域特征提取、图像平滑等图像预处理,使模糊数字图像转化为边缘清晰的模糊数字图像。图像细化是图像预处理的后续工作,其主要功能为得到与原来物体区域形状近似的由简单弧线或曲线组成的图形,细化完成后的数字图像再利用深度神经网络识别模型得到最终的吃水线识别结果。吃水线图像模糊识别算法效果如图3所示。
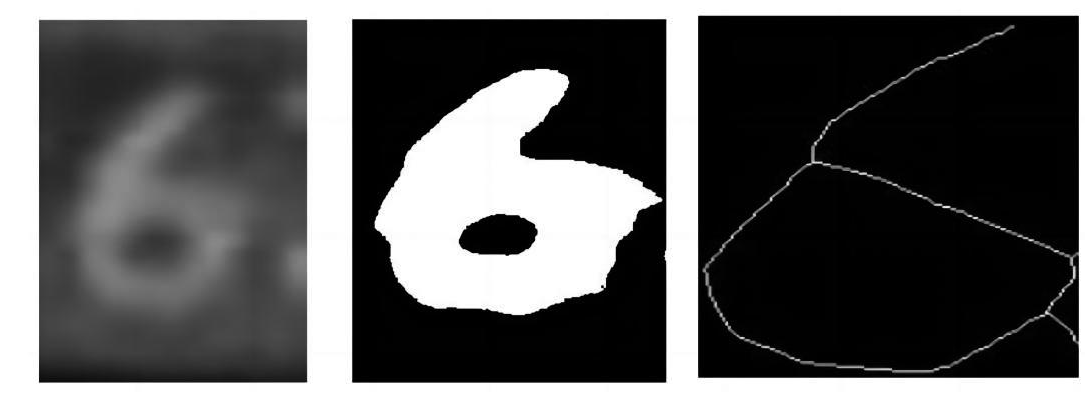
图3 吃水线图像模糊识别算法效果
Fig.3 Effect of fuzzy recognition algorithm for draft line picture
3.3 无人船平台作业流程
无人船平台作业流程如图4所示。无人船平台首先进行作业前的必要检查,如蓄电池电量检查,动力设备、通信设备检查等。无人船平台下放至海面,岸边操作人员根据待测船舶GPS信息及港内船舶停泊情况合理规划无人船平台航行路线。无人船平台开始航行后,处于自主航行模式,智能躲避既定航线上的障碍物,到达待测船舶附近海域后,操作人员将模式切换至远程遥控模式,由远程遥控指令控制无人船达到指定吃水识别作业区域。无人船平台进行吃水识别作业,自动调整摄像头角度,在高清的移动终端上可以清晰地显示船舶的吃水情况,通过模型分析,可以给出模拟读数,供鉴定人员参考,监控视频及吃水智能识别结果实时回传至地面控制基站。结束吃水识别作业后,操作人员设定无人船平台返航路线,并将无人船平台切换至自主航行模式,无人船平台开始返程航行,结束所有作业流程后,吊装至码头进行必要养护。
图4 无人船平台吃水识别作业流程
Fig.4 Draft recognition operation process of unmanned ship platform
4 结语
本文提出了一种基于水下潜航无人船为平台,具有自主航行、遥控功能、深度学习和图像模糊识别的水尺识别系统,实现了全天候、智能化水尺计重。但该装备的应用目前仅解决了水尺读数的问题,对于水尺计重的全流程优化,还缺少无人船平台与重量鉴定信息化管理系统的数据交互,下一步需要尽快打通全流程数据链,才能最大程度地改善水尺计重工作模式,进一步提升水尺计重工作的准确性。
参考文献
[1]陈希琳. 构建大宗商品安全体系 护航能源产业安全发展 访北京工商大学证券期货研究所所长胡俞越[J]. 经济, 2023(11): 42-45.
[2]刘丹. 基于图像处理的散货船港航交重计量系统[D].大连: 大连海事大学, 2012.
[3]朱学海, 罗陨飞. 基于图像处理与深度学习算法的船舶水尺智能读数分析与研究[J]. 检验检疫学刊, 2020, 30(3): 102-105+111.
[4]何红想, 阮勇防. 船舶水尺观测简易辅助设备的设计[J]. 船舶标准化与质量, 2021(1): 24-25+59.
[5]周化兵, 高伟. 基于无人机技术的全天候水尺计量的设计及应用[J]. 冶金动力, 2022(6): 71-74.
[6]阴雨蒙蒙. 煤炭运输船舶智能水尺计重技术的应用与发展[J]. 煤质技术, 2023, 38(6): 74-79.
[7]张帅, 朱学海, 罗陨飞. 船舶水尺智能识别技术的研究与进展[J]. 检验检疫学刊, 2019, 29(1):101-104.
[8]杜彬, 陈宝喜, 张程程, 等. 一种船舶水尺观测装置: 中国, ZL201720046200.X[P]. 2017-10-13.
[9]沈益骏, 李博, 王鹏皓. 雷达液位计测距技术在船舶水尺计重中的应用[J]. 中国舰船研究, 2017(6): 134-140.
[10]杨卫星, 胡广粗, 汪琳, 等. AI技术在水尺计重领域应用研究[J]. 中国口岸科学技术, 2021(1): 72-76.
第一作者:张忠义(1969—),男,汉族,浙江宁波人,研究生,工程师,主要从事进出口商品检验工作,E-mail: 48130454@qq.com
通信作者:周聪(1982—),男,汉族,浙江绍兴人,本科,助理工程师,主要从事进出口商品检验工作,E-mail: zhoucong629@qq.com
1. 宁波海关 宁波 315000
2. 中电科(宁波)海洋电子研究院有限公司 宁波 315000
3. 镇海海关 宁波 315200
1. Ningbo Customs, Ningbo 315000
2. CETC Ningbo Maritime Electronics Research Institute Co., LTD., Ningbo 315000
3. Zhenhai Customs, Ningbo 315200

