CopyRight 2009-2020 © All Rights Reserved.版权所有: 中国海关未经授权禁止复制或建立镜像

口岸集装箱智能消杀卫生处理机器人的设计研究
作者:刘巍 乔彩霞 张晓龙 夏营威 杨宇 韩晶 吴佳玲
刘巍 乔彩霞 张晓龙 夏营威 杨宇 韩晶 吴佳玲
刘 巍 1 乔彩霞 1 * 张晓龙 1 夏营威 2 杨 宇 1 韩 晶 1 吴佳玲 2
摘 要 本研究针对集装箱货物的自动卫生处理需求,设计研发了一种智能消杀卫生处理机器人。该智能消杀卫生处理机器人采用全向轮和底盘周身的传感器,使用多模态(视觉、激光、惯导、全球定位系统)环境感知的室内外自主导航方法,配有机械臂、短波紫外线(UltraViolet C radiation,UVC)紫外灯、雾化消毒装置和熏蒸消毒装置,实现集装箱紫外光消毒、雾化消毒和熏蒸消毒。该项设计既能满足口岸出入境场景中集装箱等内壁和货物外包装表面消毒,同时带有集装箱熏蒸消毒功能,是适用于口岸出入境交通工具和货物的智能消杀设备。
关键词 口岸消杀;机器人;集装箱;全自动
Design and Research of Intelligent Disinfection and Sterilization Sanitation Robot for Port Containers
LIU Wei1 QIAO Cai-Xia1* ZHANG Xiao-Long1
XIA Ying-Wei2 YANG Yu1 HAN Jing1 WU Jia-Ling2
Abstract This research has designed and developed an intelligent disinfection and sterilization sanitary treatment robot to meet the demand of automatic sanitary handling of container goods. The platform adopts omnidirectional wheels and sensors around the chassis, and uses multimodal (visual, laser, inertial navigation, GPS) environmental perception for indoor and outdoor autonomous navigation methods. It is equipped with a robotic arm, UVC ultraviolet lamp, atomization disinfection device and fumigation disinfection device to achieve container ultraviolet disinfection, atomization disinfection and fumigation disinfection. This design can not only satisfy the disinfection of the inner wall of containers and the outer packaging surface of goods in the entry-exit scene at the port, but also has the function of container fumigation and disinfection. It is an intelligent disinfection and sterilization device suitable for entry-exit vehicles and goods at the port.
Keywords port disinfection and sterilization; robot; container; full-automatic
基金项目:国家重点研发计划课题(2022YFC2302704)
第一作者:刘巍(1990—),男,汉族,北京人,本科,工程师,主要从事化学领域工作,E-mail: strcpt@163.com
通信作者:乔彩霞(1978—),女,汉族,内蒙古鄂尔多斯人,博士,研究员,主要从事病原生物学领域工作,E-mail: bjhgqcx@163.com
1. 中国海关科学技术研究中心 北京 100026
2. 中国科学院合肥物质科学研究院 安徽 230031
1. Science and Technology Research Center of China Customs, Beijing 100026
2. Hefei Institutes of Physical Science, Chinese Academy of Sciences, Hefei 230031
国际贸易中的食品、食品包装、动植物产品等运输过程中,为了防止食品、动植物产品的腐败和感染,对集装箱进行消杀是一种非常重要的货物卫生处理措施,其中短波紫外线(Ultra Violet C radiation,UVC)消杀、消毒液喷洒消杀与熏蒸消杀可以有效地杀灭集装箱内的害虫、细菌、病毒等微生物,以确保集装箱内的产品质量和安全,满足口岸集装箱场景的预防性消杀和终末消杀需求。
目前市面上存在的自动消杀装置一般只采用适用于空气和物体表面的消毒,适用场景为室内空气或物体表面消毒。对于口岸消杀场景,尤其是涉及集装箱消毒,应加强消杀力度。现有熏蒸消杀技术采用传统的人工注射方式,消杀过程中需要消毒人员主要依据日常经验,凭借手部感受到的穿刺力来感知注射针头位置及注射熏蒸情况,这就导致一方面为方便人工作业需要将集装箱移动到固定专业场所进行消杀,一方面无法对消杀操作进行数字化精确监控,从熏蒸效率及熏蒸可靠性方面均受到一定限制[1]。
近年来,口岸一线对无人智能化设备的需求愈发强烈,本研究设计的智能消杀卫生处理机器人(以下简称“卫生处理机器人”),可实现口岸集装箱全自动智能消杀。这款卫生处理机器人依靠多模态(视觉、激光、惯导、全球定位系统(Global Positioning System,GPS))环境感知自主寻路或设定路径完成集装箱智能定位,通过加载消杀模块,完成从集装箱紫外光消毒、雾化消毒及熏蒸消毒,是可应用到口岸出入境交通工具和货物的智能消杀设备。
1 卫生处理机器人的结构
卫生处理机器人的结构主要包括移动机器人底盘、中央处理器及加载熏蒸、喷洒和紫外消毒模块。卫生处理机器人功能集成如图1所示,结构如图2所示。
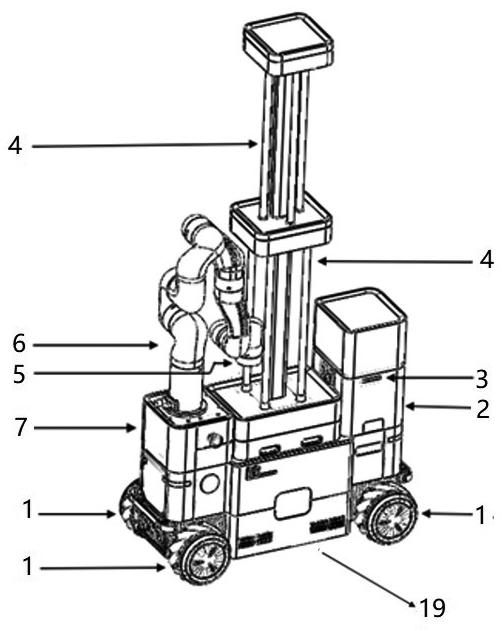
图2 卫生处理机器人结构图
Fig.2 Structural diagram of intelligent disinfection and sterilization sanitation robot
1.1 移动机器人底盘
底盘为机器人整体提供移动支撑,装有4个电机驱动器(设置于底盘内部)、4个全向轮、中央处理器(设置于底盘内部)、机械臂驱动器(设置于底盘内部)和1个电池(设置于底盘内部),底盘周身的传感器包含前方和后方的激光雷达,以及惯性测量单元、摄像头和GPS,用于环境感知和定位。电池为机器人提供长时间稳定的电力来源。电机驱动器连接全向轮,驱动控制机器人底盘的全方向移动。机械臂驱动器连接机械臂,控制机械臂的运动。中央处理器连接4个电机驱动器、机械臂驱动器、传感器、摄像头和电池状态接口。底盘结构图如图3所示。
1.2 中央处理器
卫生处理机器人的中央处理器,包括微处理器、存储器和通信模块。微处理器控制机器人的运动、消毒喷雾、紫外光消毒开关以及控制机械臂执行熏蒸消毒等。存储器存储机器人的程序和检测结果。通信模块将检测结果传输给外部设备,如手机或电脑。控制系统提供一种消毒模式选项的服务程序,通过通信模块展示在外部设备上,服务程序是一种通过浏览器打开的软件界面,软件界面上有常规消毒(常规消毒可选UVC消毒和/或雾化消毒)和集装箱熏蒸消毒两种消毒模式。开始消毒工作前,工作人员可选择外部设备上的软件界面的消毒选项,通信模块将外部设备上的消毒模式传输给控制系统,开始实现消毒流程。控制系统还提供一种控制机器人行走的服务程序,通过通信模块展示在外部设备上,同样该服务程序是一种通过浏览器打开的软件界面,软件界面上有8个控制箭头,可以控制机器人的全向轮实现前后移动、左右移动、左前方移动、右前方移动、左后方移动和右后方移动。卫生处理机器人参数见表1。
2 消杀模块设计
目前的集装箱消杀主要包括紫外、喷洒及熏蒸3种消杀方式,其中紫外、喷洒的消杀适用于已经打开的集装箱,卫生处理机器人需要进入到集装箱内部进行处理;熏蒸适用于不打开集装箱,通过通风罩的通风孔进行注入式处理。
2.1 紫外光消毒模块设计
参考GB 19258—2012《紫外线杀菌灯》[2]与GB 28235—2011《紫外线空气消毒器安全与卫生标准》[3],光学消杀模块选用朗普科技20 W双端双针紫外灯(照射能量≥65,寿命≥1000 h)为核心部件,实现253.7 nm和185 nm广谱双波长激发,采用透射率较高的石英玻璃灯管并防爆、防飞溅、防破碎,安全可靠。
通过充分模拟紫外灯照射面积和卫生处理机器人活动范围,设计了8组紫外灯构成的双层紫外灯消杀模块,消杀目标为暴露在空气气溶胶中的细菌、霉菌、孢子、病毒、原生质、休眠孢子等各类微生物,消杀效果要求不低于3-log。设计图与实物图如图4所示,包含防护罩、镇流器、保护开关等部分,可根据需求自由选用单层或双层模块[4] 。
2.2 雾化喷洒消杀模块设计
依据WS 628—2018《消毒产品卫生安全评价技术要求》[5] ,雾化喷洒消杀模块选用维科生物过氧化氢雾化发生器(喷雾量≥1000 mL/h,喷雾粒径3)为核心部件,利用最新冷蒸汽气化技术、超声波雾化技术[6] ,将过氧化氢雾化至微米级,最终分解为氧气和水,无重金属离子、无有害残留,安全可靠。
雾化喷洒消杀模块包括过氧化氢溶液储存器、超高速风机、多通道特殊喷雾头、过氧化氢自动注射器、水位检测器、过氧化氢蒸汽浓度探测器等部分,消杀目标为环境中物表存在的细菌、霉菌、孢子、病毒、原生质、休眠孢子等各类微生物,消杀效果不低于3-log。各部分项目相互配合,保证长时间干雾悬浮于空气中作无规则布朗运动,确保复杂区域渗透和消杀效果,实现过氧化氢雾化全过程监控与闭环反馈 [7] 。
2.3 熏蒸消杀模块设计
熏蒸消杀模块使用自主研发的熏蒸注入装置、熏蒸容器、熏蒸连接软管、熏蒸装置固定板、机械臂和磁性密封盖,如图6所示。通过机械臂末端的摄像头识别集装箱的通风罩,机械臂末端的熏蒸装置完成吸附磁性密封盖,机械臂通过程序学习识别密封集装箱的通风罩,并吸附在不平整的集装箱瓦楞面板上,实现罩住集装箱通风罩并注入熏蒸气体的全自动熏蒸消毒。附磁性密封盖橡胶吸附部件由内外两层橡胶构成环形结构,环形结构处于吸附状态时,橡胶吸附部件的内外两层吸附结构,能保证空腔内部的熏蒸气体不会从橡胶吸附部件与集装箱面板接触面溢出。此外,集装箱上通风罩的通风孔呈现多孔蜂窝形态,空腔内部的熏蒸管的输出头能通过集装箱的通风罩的通风孔实现快速、大流量地向集装箱内部注入熏蒸气体,可以有效地消灭集装箱中的害虫、细菌和病毒等微生物。

图6 熏蒸消杀模块实物图
Fig.6 Physical picture of fumigation disinfection and sterilization module
3 卫生处理机器人软件系统设计
3.1 软件系统架构
卫生处理机器人软件系统架构其层级图如图7所示,包括驱动层、感知层、规划层、控制层和人机交互层。驱动层主要负责相机、激光雷达和通讯设备的自动连接;感知层主要负责检测动静态障碍物并定位;规划层主要负责在消毒作业时进行路径规划;控制层主要负责机器人底盘移动和消毒方式控制;人机交互层可根据工作人员需求自由布置消毒站点并形成定制化消毒轨迹。
3.2 路径规划层
导航时,卫生处理机器人通过全局规划和局部规划实现安全的消毒作业任务,总体算法流程如图8所示。全局规划是根据上层决策指令和预先建立的环境地图,搜索可行行驶路径,是一种静态规划。本系统在静态路网中求解最短路径,通过感知层获取障碍物分布信息,并将有效路径信息传送至上述局部路径规划器。局部规划是根据传感器实时反馈数据,将全局路径解算成可行的轨迹,同时根据障碍物的位置和几何性质等信息重新规划可行轨迹。
图8 路径规划流程图
Fig.8 Path planning flowchart
3.3 人机交互层
基于Rosbridge提供端口与机器人操作系统(Robot Operating System,ROS)双向长连接,通过Java WebSocket实现应用和ROS通讯的解耦合,根据卫生处理机器人实际要求构建交互层页面布局与功能框架,如图9所示,具备自主建图、自主消毒、作业轨迹、实时监控等功能。
3.4 集装箱通风罩智能识别
为满足跨境集装箱快速消毒要求,卫生处理机器人消杀平台系统结合深度学习方法开展了通风罩模块智能识别及精准定位算法研究,为进行卫生处理机器人与机械臂协同的自主化消毒奠定基础,有效提高跨境集装箱消毒效率。
图9 消毒机器人控制软件界面
Fig.9 Disinfection robot control software interface
3.4.1 集装箱通风罩智能识别数据集构建
针对集装箱通风罩智能识别训练样本不足的问题,构建了集装箱通风罩智能识别数据集,采集了约3000张通风罩图片,并采用半人工方式进行数据清洗,去除不满足要求的图像和目标。基于选择的目标图像,对通风罩显著性区域进行语义标记等优化操作,并通过图像缩放、图像旋转、随机裁剪、引入噪声及亮度调整和色彩调整进行数据增强,进而实现集装箱通风罩智能识别数据集构建。具体如图10、图11所示。
图10 集装箱通风罩智能识别数据处理流程
Fig.10 Intelligent recognition data processing flow of container ventilation hood

图11 集装箱通风罩智能识别数据集构建
Fig.11 Construction of intelligent recognition dataset for container ventilation hood
3.4.2 集装箱通风罩智能识别方法研究
针对集装箱通风罩智能识别需求,研究设计一种单阶段的通风罩快速精确分类方法。该方法首先利用双向特征金字塔结构加权融合不同分辨率的特征图,促进不同层级之间信息的传递和交换。之后设计动态权重分配机制平衡每个特征图在融合过程中的贡献,以此来获得高层次的特征,提升模型的感知能力。最后,利用反向传播算法优化神经网络的权重和偏置,结合优化器进行自适应学习率调整,保证算法在训练时的高效性和稳定性,加快损失的收敛速度,提升通风罩智能识别精度。具体如图12、图13所示。
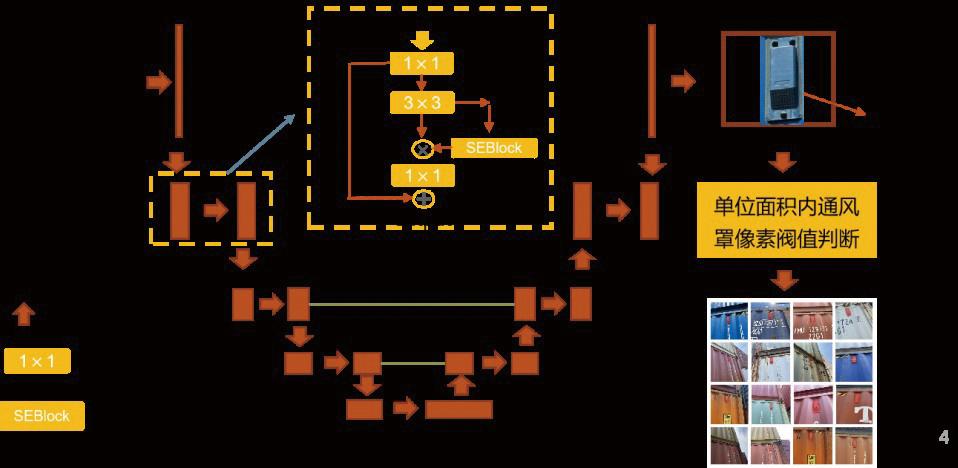
图12 集装箱通风罩智能识别网络框架图
Fig.12 Intelligent recognition network framework diagram for container ventilation hood
3.4.3 集装箱通风罩精准定位方法研究
基于智能识别结果及智能识别数据集提供的通风罩先验尺度信息,联合双目相机提供的先验深度信息,结合相机的成像几何模型及2D-3D点对约束,估计集装箱通风罩在相机坐标系下的姿态,实现从区域识别到空间坐标定位换算。通过标定相机坐标系与机器人坐标系坐标解算关系,实现基于视觉的集装箱通风罩精准定位。具体如图14所示。
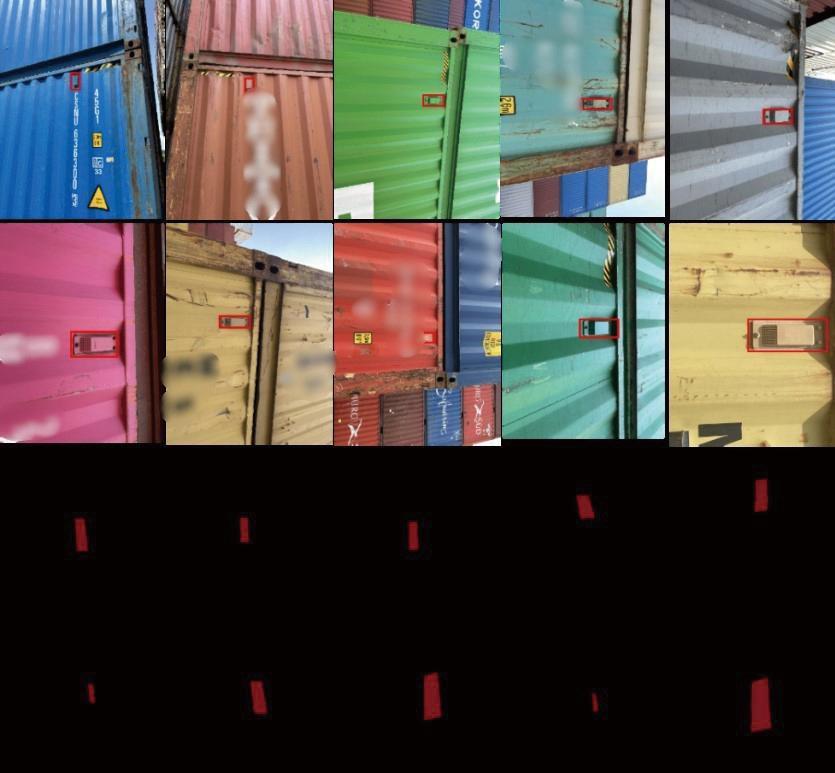
图13 集装箱通风罩智能识别结果
Fig.13 Intelligent recognition results of container ventilation hood
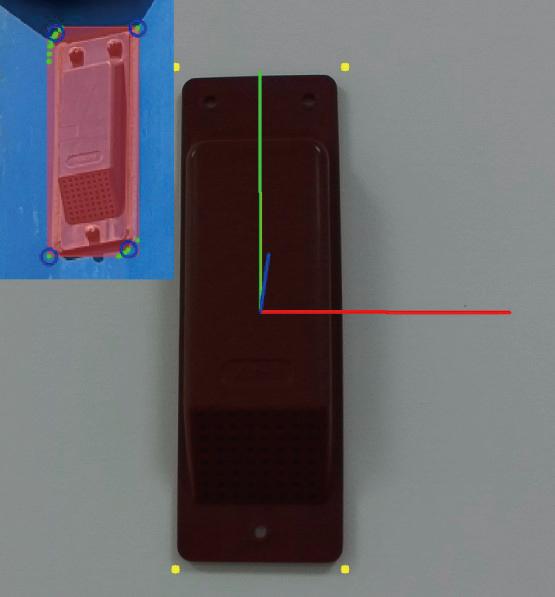
图14 通风罩识别结果
Fig.14 Identification results of ventilation hood
4 卫生处理机器人消杀流程
4.1 卫生处理机器人的集装箱定位
使用卫生处理机器人平台在集装箱堆中行走,并使用同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术实时定位机器人。工作人员通过外部设备控制机器人的移动,激光雷达扫描周围环境,获取障碍物和地形等信息,惯性测量单元和GPS单元记录机器人的运动轨迹。获取机器人周围环境的点云或图像信息,并利用SLAM算法[8-9]构建地图并保存到微控制器。在这个过程中,记录集装箱的位置和姿态到控制系统的存储器中。集装箱的姿态可以作为地图中的一个关键点或特征点,帮助机器人确定自身在地图中的位置和方向。在检测和识别出集装箱之后,可以计算出集装箱相对于机器人的位置和姿态。利用机器人的位姿信息和摄像头的内外参数等,进行图像配准和几何计算,计算出集装箱相对于机器人的位置和姿态。
4.2 实现卫生处理机器人的集装箱喷洒与紫外光消毒
工作人员通过外部设备选择雾化喷洒消毒、UVC紫外光消毒两种消毒模式选项。控制机器人移动到集装箱内部后,中央处理器相应启动工作人员选择的消毒模式,缓慢在集装箱内部边移动边消毒。
雾化喷洒消毒模式使用超声波雾化技术,利用超声波振动将消毒液震成微小的水雾颗粒,形成雾状消毒液水汽,从雾化物储存箱上的雾化输出头中喷出进行消杀工作。
UVC紫外光消毒模式进行消毒:将UVC灯管打开,移动机器人使其辐射照射集装箱内部,以达到消毒的目的。
4.3 实现卫生处理机器人的集装箱熏蒸消毒
工作人员通过外部设备选择熏蒸消杀模式,卫生处理机器人自动移动到集装箱前的位置上,根据集装箱相对机器人的位置和姿态,控制系统计算出机器人最终行走到的位置和姿态,该位置相对于集装箱有固定的距离,该距离大于机器人上机械臂可以伸展的最大距离。机器人的最终到达姿态为机器人面对集装箱,即机器人前方朝向集装箱。保证机器人行驶到该位置后,伸展机械臂,使机械臂的高度达到最高。控制系统控制摄像头面对集装箱拍摄图像,同时缓慢移动机器人围绕集装箱移动,过程中保证摄像头面对集装箱。
在行走过程中摄像头拍摄集装箱图像,并使用计算机视觉技术对这些图像进行处理。摄像头拍摄到的图像进行去噪和畸变矫正,对图像使用Canny边缘检测算法和尺度不变特征转换(Scale-Invariant Feature Transform,SIFT)特征提取算法进行边缘检测和特征提取。在处理后的图像中,使用目标检测算法检测出集装箱通风罩的位置和大小。使用已经训练好的集装箱通风罩目标检测模型,例如“你只需看一次”目标检测算法(You Only Look Once,YOLO)、目标检测算法(Faster Region with Convolutional Neural Networks Feature,Faster R-CNN)等,对图像中的集装箱通风罩进行检测和定位[10] 。
中央处理器控制机械臂恢复到默认姿态,控制末端关节旋转,直到摄像头中图像找到磁性密封盖,根据密封盖相对于末端关节的位置,控制机械臂末端上的熏蒸注入装置的橡胶吸附部件移动到磁性密封盖的上方。控制机械臂末端向下移动,使得橡胶吸附部件的吸盘面完全接触到密封盖,控制真空发生器使得吸附装置吸附住磁性密封盖。中央处理器控制机械臂末端伸展到集装箱的通风罩的正前方,保持机械臂末端的橡胶吸附部件的吸附装置垂直于集装箱的通风罩,控制机械臂末端旋转,直到磁性密封盖的姿态与通风罩一致。控制机械臂末端关节向通风罩移动,直到磁性密封盖完全接触到通风罩的外围的集装箱面板,控制真空发生器使得吸附装置放下磁性密封盖。机器人重复操作密封集装箱,直到完成倒数第二个通风罩的识别和磁性密封盖的密封。卫生处理机器人对目标集装箱进行密封如图15所示。

图15 卫生处理机器人对目标集装箱进行密封
Fig.15 Intelligent disinfection and sterilization sanitation robot seals the target container
当发现最后一个集装箱通风罩时,机械臂末端上的熏蒸注入装置执行熏蒸注入操作,通过熏蒸注入装置上的熏蒸输出头往集装箱内灌入熏蒸气体。机器人记录灌入熏蒸气体的时间。
中央处理器控制熏蒸容器的阀门打开,熏蒸输出头释放出熏蒸气体在橡胶吸附部件的空腔。空腔内部的熏蒸输出头能通过集装箱通风罩的多孔蜂窝形态通风孔实现快速、大流量地向集装箱内部注入熏蒸气体。
中央处理器根据灌入熏蒸气体的时长和熏蒸容器的阀门压力表的反馈值,判断结束灌入熏蒸气体的条件,控制熏蒸输出头的阀门关闭,结束灌入熏蒸气体。中央处理器根据灌入熏蒸气体的时长,计算出投药量。根据投药量和熏蒸处理技术指标规定的时间计算出熏蒸时间,开始等待熏蒸时间。
中央处理器计算熏蒸等待时间到达后,控制真空发生器使得吸附部件从集装箱面板上松开,控制机械臂恢复到默认姿态。机器人通过语音、文字播放熏蒸消毒结束信号,结束信号中包括熏蒸消毒的投药量和熏蒸时间等。
5 结论
本文中设计研究的口岸大规模卫生处理机器人不仅适用于海关对集装箱进行卫生处理,经过数据库的扩增与后续调整,还是一种智能感知平台,几乎能够覆盖所有涉及无人移动平台的应用领域。产品定型初期不仅可以快速用于海关集装箱卫生处理以保障需求,待产品通过产品认证及测试,并进行应用示范后,还可以服务于物流配送、应急救援等无人平台开展自主化操作。因此,这对于加速口岸智能无人系统建设,促进无人移动平台应用、普及推广的具有重要意义。
参考文献
[1] 朱伟平, 陈志强, 李元景, 等. 集成于海关集装箱机检查验的嗅探仪研制[J]. 中国口岸科学技术, 2020(7): 36-42.
[2] GB 19258—2012 紫外线杀菌灯[S]. 北京: 中国标准出版社, 2012.
[3] GB 28235—2011紫外线空气消毒器安全与卫生标准[S]. 北京: 中国标准出版社, 2011.
[4] 薛斌, 闫建昌, 王军喜, 等. 紫外消毒技术与紫外光源发展趋势[J]. 照明工程学报, 2020, 31(2): 9-10.
[5] WS 628—2018 消毒产品卫生安全评价技术要求[S]. 北京: 中国标准出版社, 2018.
[6] 陶莉, 杨庆贵, 朱光耀. 一种新型雾化消毒剂对重集装箱内环境消毒效果[J]. 环境与健康杂志, 2020, 37 (7): 643-645.
[7] 马赛, 黄佳礼, 邵柏. 超声波雾化技术在卫生除害处理工作中的运用[J]. 中国国境卫生检疫杂志, 2005 (S1): 63-66.
[8] 包长春, 陈帅, 谭俊杰. 基于激光雷达增强的无人机视觉SLAM地图构建方法的研究[J]. 科学技术创新, 2024, 16: 34-37.
[9] 宋鑫鹏, 赵倩. 基于ROS和SLAM的无人消杀机器人系统设计[J]. 自动化仪表, 2023, 44 (1): 61-65+71.
[10] 宋凯, 周天阳, 何运辉. 口岸数字化转型:集装箱多箱体检测与箱号自动识别创新[J]. 上海信息化, 2022, 4: 36-39.
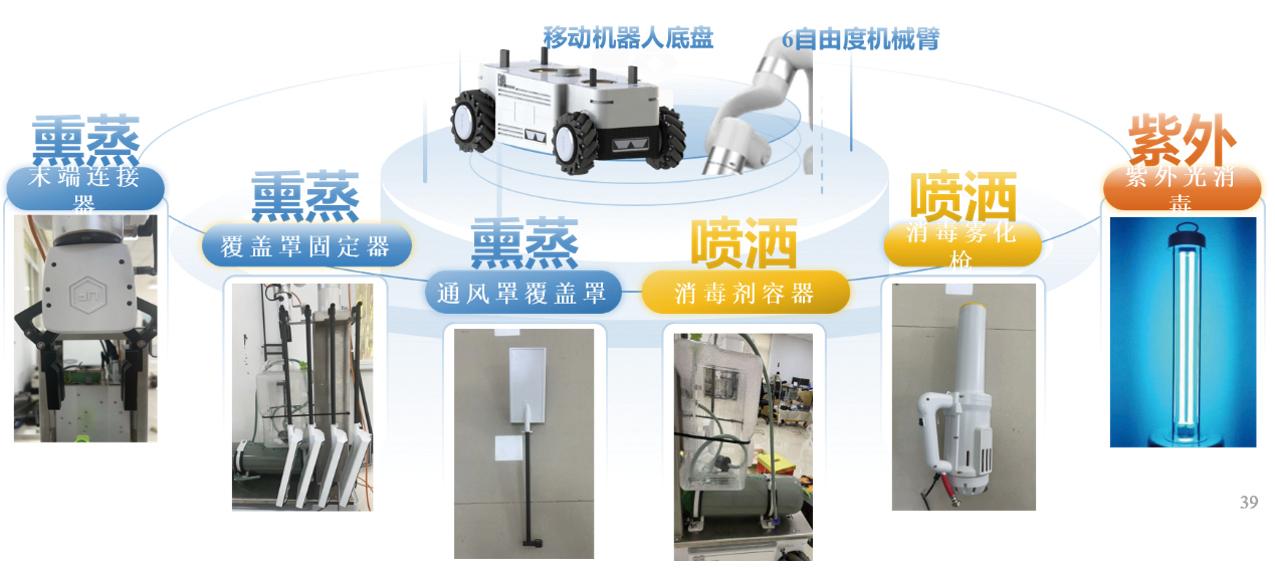
图1 卫生处理机器人功能集成
Fig.1 Functional integration of intelligent disinfection and sterilization sanitation robot
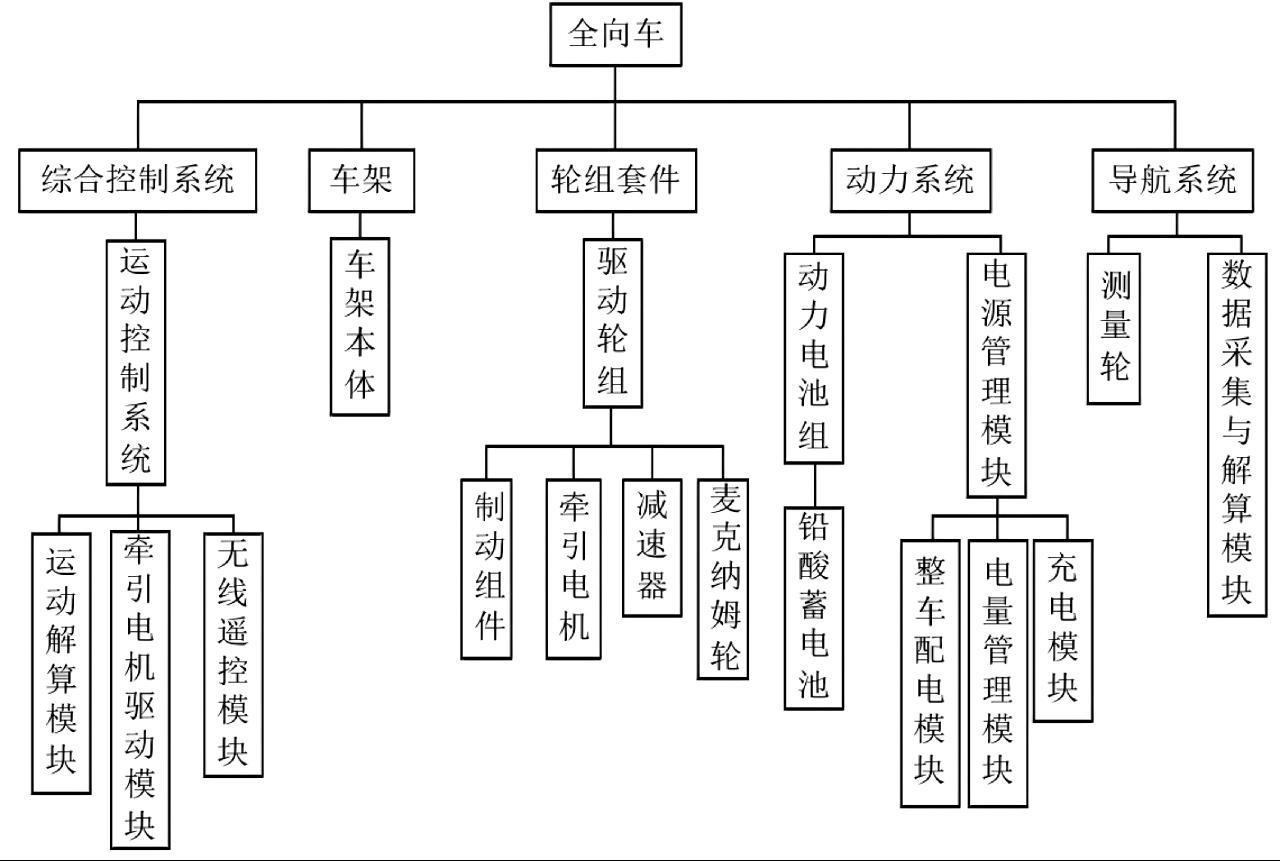
图3 全向移动底盘整体结构框图
Fig.3 Overall structural diagram of omnidirectional mobile chassis
表1 卫生处理机器人参数表
Table 1 Parameter table of intelligent disinfection and sterilization sanitation robot
功能 | 参数 | 功能 | 参数 |
消杀方式 | 熏蒸、紫外、喷洒等 | 电池规格 | 铅酸36 Ah / 磷酸铁锂30 Ah |
额定载重 | 60 kg | 充电方式 | 自主 |
箱体容积 | 18 L | 充电时间 | 0~80%, <3 h |
导航方式 | 全景视觉 | 续航时间 | 8 h |
驱动方式 | 麦克纳姆轮全向移动 | 运动精度 | 5 cm |
爬坡能力 | <15° | 设备自重 | 60 kg |
越障能力 | <2 cm | 通信方式 | 4G网络 / 通用路由封装 (Generic Routing Encapsulation, GRE) 专网 |
运行速度 | 0.3~1.5 m/s | 外形尺寸 | 800 mm×410 mm×1200 mm |
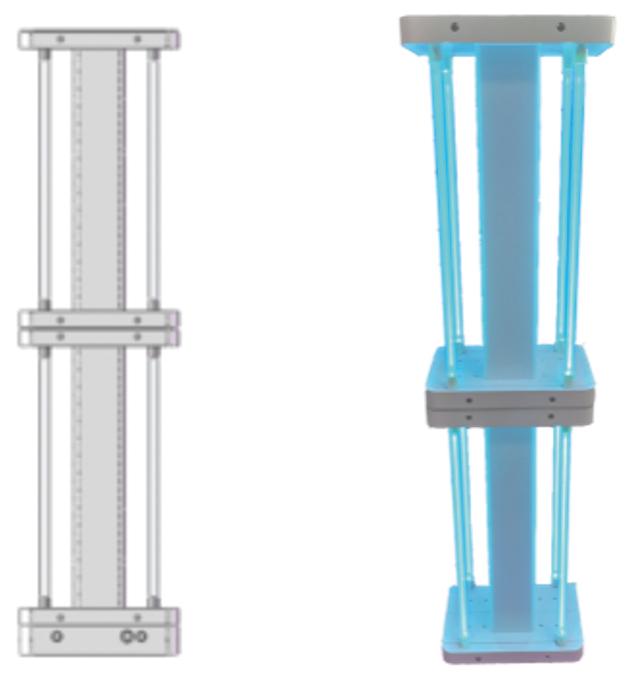
图4 紫外灯消杀模块设计图与实物图
Fig.4 Design drawing and physical drawing of UV lamp disinfection and sterilization module
图5 干雾过氧化氢消杀模块设计图与实物图
Fig.5 Design drawing and physical drawing of dry fog hydrogen peroxide disinfection and sterilization module
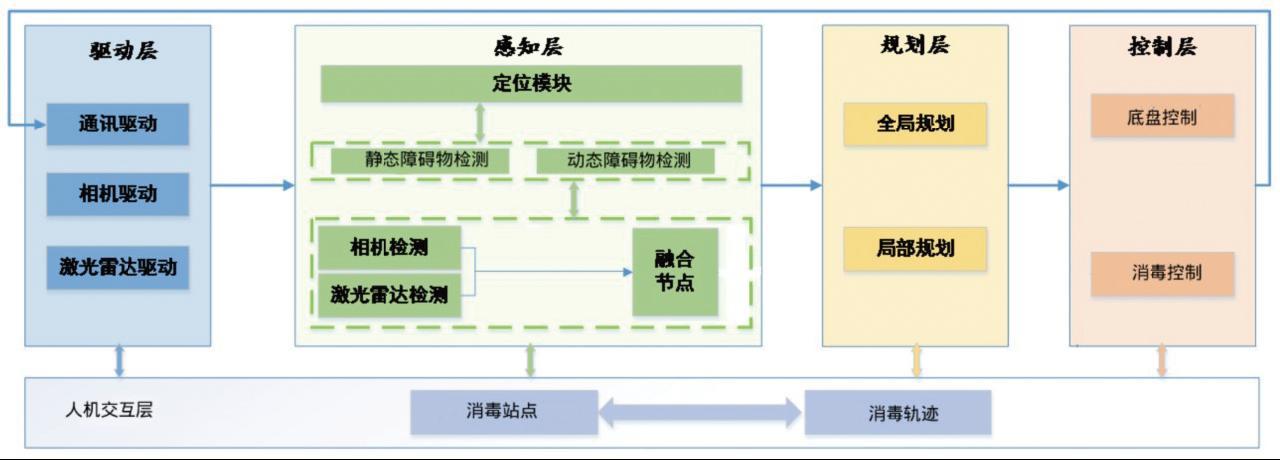
图7 卫生处理机器人软件系统架构与层级图
Fig.7 Software system architecture and hierarchical diagram for intelligent disinfection and sterilization sanitation robot
